




")








 в итоге получаем где Эта задача на собственные значения решается для p при произвольных значениях M, k и .")







 с PARAM, KDAMP, -1 PK-метод только вязкое демпфирование: Де…")

 вычисляются заранее. Эти (M, k) пары определяются в объекте MKAEROi из bulk data. В действительности матрицам…")

, задается в case …")
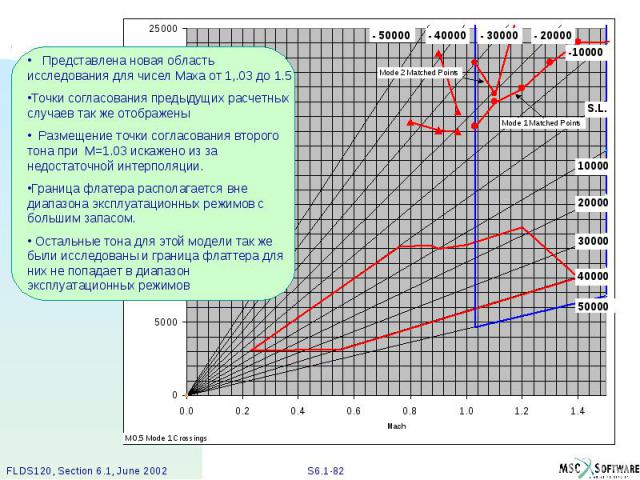
. Как правило, исследуются точки пересечения для ряда констант …")






 Результаты показывают, что в модели наблюдается отсутс…")







 и ряд различных скоросте…")



")
 используя значение частот")




")





























 Дозвуковые – метод дипольных решеток Приведенная частота должна быть > 0.0 Перенос не допускае…")



Презентация на тему: MSC.Flightloads 6.1


Что такое флаттер? Флаттер – это динамическая неустойчивость упругой конструкции в потоке газа. Неустойчивость конструкции проявляется в очень быстром нарастании амплитуд колебаний, которое как правило приводит к разрушению элемента конструкции, подверженного флаттеру. Каждый элемент упругой конструкции, обтекаемой потоком газа, совершает сложное колебательное движение. Эти движения часто не совпадают по фазе. При неблагоприятном сдвиге фаз упругий элемент ЛА начинает получать из набегающего потока значительно большее количество энергии, чем то, которое рассеивается внутри элемента. В результате амплитуды колебаний элемента быстро возрастают и в течение нескольких секунд наступает разрушение.

Инженерный подход К конструкции прикладывается искусственная нагрузка, вызывающая гармонические колебания. Система является стабильной, если энергия искусственной нагрузки рассеиватеся в конструкции Если конструкции сообщается большее количество энергии, чем может рассеится, то происходит флаттер

Уравнение динамики Уравнение динамики имеет вид Из-за наличия волнового следа, аэродинамическая нагрузка является зависимой от времени

Аэродинамическая нагрузка при гармонических колебаниях В случае установившихся гармонических колебаний перемещения вычисляются: Аэродинамическая нагрузка: где (следует помнить )

Гармонические колебания В случае установившейся гармонических колебаний уравнение динамики имеет вид: - матрица искусственной нагрузки, необходимой для возбуждения гармонических колебаний.

Изменение энерии Работа искусственной нагрузки за один период времени Т может быть выражена как Пусть . Значить что означает

Уравнения флаттера Уравнение флаттера имеет вид Система устойчива если нет действительных корней при g > 0. Флаттер получаем если есть действительные корни при g > 0. Поиск области устойчивости, для каждого действительного корня существует значение g, которое является функцией от скорости.

Обсуждение уравнения флаттера Уравнение флаттера - нелинейная задача по определению комплексных собственных значений. Рассматриваются случаи, когда для комбинации параметров , g, q, k и M существует нетривиальное решение Ua. Однако, значения параметров должны соответствовать выражениям: где V – скорость полета, h – высота.

Точки согласования Точки согласования – это такие комбинации скорости полета V и высоты h, для которых Справедливы вышеупомянутые уравнения и Существвует действительная , удовлетворяющая уравнению флаттера и Для которой g = 0. В диапазоне эксплуатационных режимов не должно существовать точек согласования.

Модальное преобразование По причине наибольшей эффективности, уравнение флаттера, после решения, всегда преобразовывается в модальные координаты Если требуется, то в преобразованное уравнение могут быть введены дополнительные точки.

Методы решения В MSC.Nastran доступны четыре метода решения: PK-метод – вычисляются собственные значения и собственные вектора для значения скоростей, определяемых пользователем. PKNL-метод – похожий на PK-метод, но в этом расчете не используются все вариации плотности, чисел Маха и скорости. Расчет производится только для комбинаций параметров. Этот метод необходим для детального исследования точек флаттера. K-метод – расчитываются собственные значения и собственные вектрора для заданной пользователем приведенной частоты. KE-метод – более эффективный, чем K-метод, но в нем не учитывается вязкое демпфирование.

K-метод: идея В аэродинамический коэффициент входит эквивалентная масса : Коэффициент вязкого демпфирования вычисляется как . Следовательно, полученное уравнение эквивалентно исходному уравнению флаттера при g = 0 .
 в итоге получаем где Э")
K-метод: задача на собственные значения Поделив на (1+ig) в итоге получаем где Эта задача на собственные значения решается для p при произвольных значениях M, k и .

K-метод: результаты вычисления V и g могут быть получены из p2: Частота f может быть получена, если известны значения V и k:

K-метод: постпроцессинг Построив график зависимости g от V можно определить скорость при которой кривая g пересечет ось абсцисс, значения g изменяются от отрицательных к положительным. В конечном счете, этот метод позоляет проверить является ли высота h такой, что скорость V согласуется с заданными параметрами M и

KE-метод KE-метод – метод, аналогичный K-методу, но Bhh не учитывается Собственные вектора не вычисляются Значения корней сортируются по скорости Этот метод лучше всего использовать когда нужен детальный анализ или если необходимо построить график V-g.

PK-метод: идея Действительная часть коэффициента аэродинамической жесткости содержит жесткость. Мнимая часть коэффициента аэродинамической жесткости содержит вязкое демпфирование. Принимается g = 0.

PK-метод: задача на собственные значения где Все матрицы в этой задаче на собственные значения действительные. Задача на собственные значения решается для p при произвольных значениях M, V и . Для итераций необходимо согласование и k.

PK-метод: результаты вычислений и могут быть вычислены из p. Комплексный корень p: Действительный корень p:

PK-метод: постпроцессинг График зависимости от V позволяет определить скорость, при которой пересекает нуль, изменяя свои значения с отрицательных на положительные. Точка пересечения означает возможную скорость флаттера. В заключение, этот метод позволяет проверить, является ли высота h, такой что скорость V, соответствует определенным значениям M и

Демпфирование в задачах флаттера K-метод учитывает все виды демпфирования. KE-метод учитывает только демпфирование конструкции : GE в объекте MATi PARAM, G Модальное демпфирование (TABDMP1) с PARAM, KDAMP, -1 PK-метод только вязкое демпфирование: Демпфирующие элементы: VISC, CDAMPi Прямой ввод матриц: B2GG, B2PP Модальное демпфирование (TABDMP1) с PARAM, KDAMP, 1

Решение задач на комплексные собственные значения K-метод: Могут быть использованы все методы, реализованные в MSC.Nastran. Для объекта EIGC из bulk data необходимо выбрать в control command переменную CMETHOD. Рекомендуется использовать метод Хезенберга (Hessenberg method). KE-метод и PK-метод: Используется метод Хезенберга. Объект EIGC не требуется.

Матричная интерполяция Для обеспечения наибольшей эффективности, аэродинамические матрицы для множества пар, заданных пользователем, (M, k) вычисляются заранее. Эти (M, k) пары определяются в объекте MKAEROi из bulk data. В действительности матрицам необходима интерполяция. В PK- и PKNL-методах не происходит интерполяции числа Маха.

Объекты, задающие расчет флаттера Объект FLUTTER из bulk data entry: Определяется метод расчета флаттера Ссылается на множество объектов FLFACT Если выбран FMETHOD в case control command Объект FLFACT из bulk data entries: Для K- и KE-методов эти объекты определяют набор значений M, k и . Для PK- и PKNL-методов – набор значений M, V и .

Результаты расчета флаттера Результаты: Приведенная частота k и приведенная скорость 1/k Плотность и число Маха Скорость и демпфирование Частоты и комплексные собственные значения Формы флаттера: K-метод: DISPLACEMENT (перемещения), задается в case control command PK- и PKNL-методы: DISPLACEMENT (перемещения), задается в case control command и отрицательная скорость в объекте FLFACT в bulk data entry Графики: Коэффициенты демпфирования и частоты, в зависимости от скорости

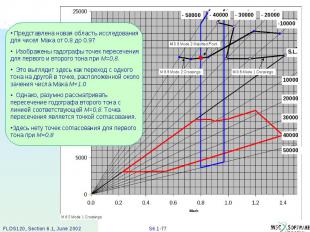
Результаты вычислений График g-V позволяет определить точки пересечения: Точка пересечения может быть отображена для конкретного ряда V, для заданного M и коэффициента плотности (высоты). Как правило, исследуются точки пересечения для ряда констант M на различных высотах.

Поиск точек согласования

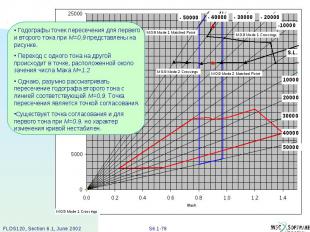
Поиск точек согласования

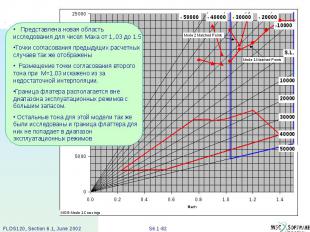
Граница флаттера Множество точек согласования определяет границу флаттера. Обычно рассматривается 15% запас в диапазоне эксплуатационных режимов

Граница флаттера: пример

Пример На следующей странице представлен детальный пример расчета флаттера: Отладка модели Оценка параметров флаттера Стратегия исследования Расчет Интерпретация результатов Используется модель TS1 – истребитель, который использовался в статической аэроупругости. Используется PK-метод.

Отладка модели – собственные частоты В начале мы проведем расчет на собственные частоты для определения ряда частот, используемых для вычисления k и использования при проверке сплайнов.

Отладка модели – расчет балансировки Далее мы проведем расчет статической аэроупругости для ряда значений числа Маха и высоты, необходимый для проверки качества модели (смотри предыдущий раздел) Результаты показывают, что в модели наблюдается отсутствие структурного определения сплайнов и «бедные» сплайны, расположенные на фюзеляжной части оперения.

Результаты расчета балансировки

Результаты расчета балансировки: вынесенное оперение

Диапазон эксплуатационных режимов

Оценка ряда M, k и V Исходя из данных диапазона эксплуатационных параметров и собственных частот в неподвижном воздухе мы можем оценить значения ряда чисел Маха, приведенной частоты и скорости Скорости: Минимальная скорость = 3080in/s (M = 0.23 на уровне моря) Максимальная скорость = 16314in/s (M = 1.4 на высоте 40000ft) Примечание: скорость требуется вводить в TAS (истинная скорость полета) Частоты: Минимальная частота = 3.57Hz ( 22.5rad/s) Максимальная частота = 47.0Hz ( 295.1rad/s) Длина хорды: c = 95in

Проверка плотности аэродинамической сетки

Проверка плотности аэродинамической сетки

Ограничения ряда M, k и V

Стратегия исследования Эффективным путем поиска диапазона эксплуатационных режимов для точек флаттера является полет при одном значении числа Маха на различной высоте. Из этого вытекает, что нужно задать множество пар (M, k) и ряд различных скоростей для каждой исследуемой области. Рассмотрим исследуемые области: Search 1: M = 0.5, 0.6, 0.7 Search 2: M = 0.8, 0.9, 0.97 Search 3: M = 1.03, 1.1, 1.2, 1.3, 1.4, 1.5

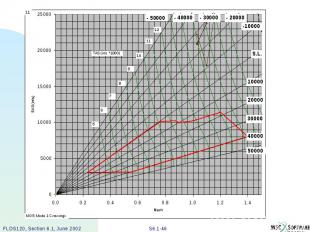
Стратегия исследования Для каждой исследуемой области выполняется один расчет. В качестве альтернативы мы можем в одном расчете объединить все исследуемые области. Преимущество множественного расчета заключается в том что мы можем получить выигрыш при дальнейшем расчете, т.е. используя полученные значения V и k мы можем прогнозировать область следующего исследования. В нашем случае, при первом расчете мы будем рассматривать значения чесел Маха от 0.5 до 0.7 и высоты от 50,000 ft до –50,000 ft с шагом 10000 ft. Использование отрицательной высоты может показаться странной идеей, но с точки зрения математики эти коэффициенты плотности правомерны. Эти значения дополняют значения реальной картины и позволяют нам определить все границы.

Первоначальная область исследования
")
Определение пары (M, k)
 используя значение частот")
Определение пары (M, k) используя значение частот

Определение «смещенных» приведенных частот

Расчет флаттера для первой области исследований Мы создадим расчетный случай для каждого значения числа Маха : 0.5, 0.6 и 0.7 В настоящее время не все данные могут быть без труда установлены через графический интерфейс FlightLoads , исключая случая использования большого числа расчетных случаев. Поэтому, для облегчения себе жизни, мы будем вручную править выходной .bdf файл FlightLoads Допустим, что аэродинамические плоскости и сплайны были созданы до расчена на статическую аэроупругость. В этом расчетном случае мы будем повторно использовать данные из базы данных FLDS .

Установка параметров аэроупругой модели

Создание расчетного случая
")
Создание расчетного случая: выбор пары (M, k)

Создание расчетного случая: параметры расчета на флаттер

Виды задания расчета флатера

Выбор скоростей Диапазон эксплуатационных режимов показывает что наименьшее значение TAS получается на высоте –50,000ft при M = 0.5 и скорости 7763in/s. Зхначения k-ряда от 0.089 ... 1.069. Соответствующий ряд скоростей от 1000in/s до 60,000in/s. Рассмотрим ряд скоростей от 2000in/s до 15,000in/s с шагом 1000in/s.

Таблица данных для расчета флаттера

Параметры для действительный собственных значений

Выбор расчетных случаев и установка параметров расчета

Исполняемые команды и команды для Case Control

Объект MKAERO2

Объекты FLUTTER и FLFACT

Редактирование коэффициентов плотности

Результаты На следующей странице обсуждаются результаты, выводимые в файл .f06. Графики V-g и V-f могут быть получены с помощью функций Nastran. Альтернативный метод предусматривает создание файла .pch для постпроцессинга в ином програмном обеспечении. Значения комплексных собственных векторов для полученных корней уравнения флаттера могут быть записаны в файл .xdb. В Patran можно произвести анимацию этих векторов на соответствующих отрицательных скоростях.

Результаты представленные в файле .f06 Ниже представлены результаты полученые при M = 0.5 и изменении высоты от –50000ft до -10000ft, для первого тона. При этом числе Маха не были найдены точки пересечения, соответствующие высоте равной уровню моря Результаты, аналогичные, полученным для первого тона, были получены и для всего исследуемого ряда (M = 0.5 ... M = 0.7). Точки пересечения выделены и обозначены как Point A ... Point E. Для второго тона тоже были найдены точки пересечения, но они не представлены здесь.

Тон 1, M = 0.5: -50,000ft и –40,000ft

Тон 1, M = 0.5: -30,000ft и –20,000ft

Тон 1, M = 0.5: -10,000ft

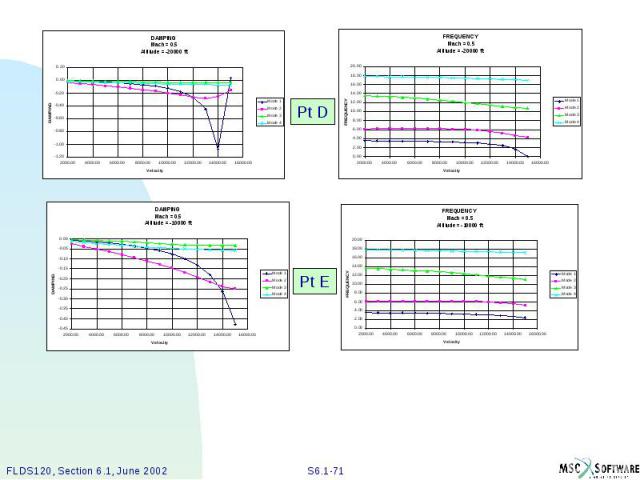
Графики V-g и V-f На следующей странице представлены графики V-g и V-f, на которых изображены точки пересечения A ... E.



Пояснения к графикам V-g и V-f Как видно из графиков для точек A ... D, для первого тона наблюдается сначала быстрый спад демпфирования, а потом резкий рост до положительных значений. Из графиков для точек A ... D видно, что частота, при пересечении значений демпфирования нуля, падает до нуля. Это означает статическую дивергенцию. В точке E наблюдается такая же тенденция, однако расчет ограничивается скоростью 15000ft/s, что приводит к неполному отображению характера изменения кривых.

Пояснения к графикам V-g и V-f Для других тонов, для первых нескольких графиков V-g, наблюдается аналогичная картина, но для построения остальных графиков картина немного изменяется из-за ограниченного числа значений скоростей. Сопоставьте все полученные результаты с приведенными графиками.

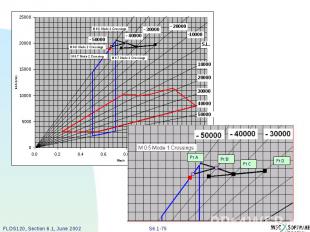
Проверка точек согласования Точки перечесения A ... D первого тона, изображенные на диаграмме M-EAS, размещены по высоте и TAS. Кривые, соединяющие точки не должны пересекать линию M = 0.5. Таким образом, первый тон не имеет точки согласования в рассмотренной области исследования.

Расчет флаттера во второй области исследования



Расчет флаттера в третьей области исследования

Объект FLUTTER из Bulk Data

Объект FLUTTER из Bulk Data SID ссылается на FMETHOD из Case Control FMETHOD = SID Расчетная плотность = RHOREF*плотность из объекта FLFACT ссылающегося на DENS RHOREF задается в объекте AERO из bulk data.

Объект FLFACT из Bulk Data FLFACT основная карта, связывающая данные для расчета флаттера. Факторы расчета используются в порядке в котором они заданы Альтернативная форма для задания приведенной частоты описана в MSC.NASTRAN Quick Reference Guide

Объект MKAERO2 из Bulk Data

Объект MKAERO2 из Bulk Data Часла Маха могут только быть 0.0, Сверхзвуковые значения чисел Маха и активируют метод Зона51 (если включена опция Aero II) Дозвуковые – метод дипольных решеток Приведенная частота должна быть > 0.0 Перенос не допускается. Дополнительные данные могут быть заданы с использование дополнительных объектов. Все значения M и K будут использоваться при вычислении аэродинамических матриц

Объект MKAERO1 из Bulk Data

Объект MKAERO1 из Bulk Data

Объект EIGRL из Bulk Data Entry











