


 СТАТИЧЕСКАЯ НАГРУЗКА – ПРЯМОЙ МЕТОД ЗАДАНИЯ..………………….…7 - 28 ЗАМЕЧАНИЯ К СПОСОБУ ЗАДАНИЮ ВНЕШНЕГО ВОЗДЕЙСТВИЯ………….7 - 30 НАЧАЛЬНЫЕ УСЛОВИЯ.………………………………………………………………..7 - 32 ОПЕРАТОР TSTEP…...………………………………………………………")


")


 + B2GG B2 - прямой ввод матриц B2PP + передаточные функции G - коэффициент глобального конструкционного де…")
![Модальный метод анализа Преобразуем физические координаты в модальные. (1) Временно пренебрежем демпфированием. (2) Подставим уравнение (1) в уравнение (2) (3) Умножим обе части уравнения (2) слева на [ T] (4) где TM - модальная матрица масс (диагон…](https://fs1.ppt4web.ru/images/95267/165325/640/img9.jpg "Модальный метод анализа Преобразуем физические координаты в модальные. (1) Временно пренебрежем демпфированием. (2) Подставим уравнение (1) в уравнение (2) (3) Умножим обе части уравнения (2) слева на [ T] (4) где TM - модальная матрица масс (диагон…")
 может быть записано как для несвязанной системы с одной степенью свободы (СС): (5) где mi - i-я модальная масса ki - i-я модальная жесткость pi - i-ое модальное воздействие")



, CRIT или Q Например:…")
 и gi составляют пару “частота - демпфирование”. Демпфирование для мод собственных колебаний определяет…")



 пространственного распределения воздействия и масштабного фактора (DAREA, статическая нагрузка, тепловая нагрузка или LSEQ) - временной сдвиг (оператор DELAY) F(t- ) - таблица (оп…")
. Вынужденные перемещения – см. Раздел 12.")
 пространственного распределения воздействия и масштабного фактора (DAREA, статическая нагрузка, тепловая нагрузка или LSEQ) задается оператором DELAY (может использоваться только с …")


 на 0,2с и прикладывается к узлу 30 в направлении оси X (компонент T1).")


 DLOAD Case Control Bulk Data TLOAD Динамика Идентификатор Зависи…")

. Это сделает нагрузки более плавными и уменьшит влияние погрешностей. Избегайте “разрывов” в нагрузках. Это может приводить к различиям в результатам расчетов, вып…")


.")

, а матрицу A1 - еще и обратить.")


 LOADSET (может применяться при обоих методах) METHOD (требуется при модальном мет…")
 EIGRL or EIGR (требуется при модальном методе) TSTEP (требуется при обоих методах решения) TIC (может применяться при прямом метод…")
 GPSTRESS NLLOAD (вывод значений нелинейных нагрузок) OLOAD (вывод значений прилагаемых нагрузок) SACCELERATION (вывод результатов решения для A-set SDISP…")


















Презентация на тему: MSC.Nastran 102 2001 - 07

Раздел 7 Анализ переходного процесса

Раздел 7. Анализ переходного процесса ВВЕДЕНИЕ В АНАЛИЗ ПЕРЕХОДНОГО ПРОЦЕССА…..……………………..7 - 4 ПРЯМОЙ МЕТОД АНАЛИЗА………………………………………………………..7 - 5 ДЕМПФИРОВАНИЕ ПРИ ПРМОМ МЕТОДЕ АНАЛИЗА.……………………….7 - 9 МОДАЛЬНЫЙ МЕТОД АНАЛИЗА..………………………………………………..7 - 10 ДЕМПФИРОВАНИЕ ПРИ МОДАЛЬНОМ МЕТОДЕ АНАЛИЗА.……………….7 - 12 ВЫЧИСЛЕНИЕ РЕЗУЛЬТАТОВ ПРИ МОДАЛЬНОМ МЕТОДЕ АНАЛИЗА....7 - 17 УПРАВЛЕНИЕ МОДАМИ.…………………………………………………………….7 - 18 ЗАДАНИЕ ВНЕШНЕГО ВОЗДЕЙСТВИЯ.…………………………………………7 - 19 ОПЕРАТОР TLOAD1…………………………………………………………………..7 - 20 ОПЕРАТОР TLOAD2…………………………………………………………………..7 - 22 КОМБИНАЦИЯ НАГРУЗОК – ОПЕРАТОР DLOAD………………………..…….7 - 23 ОПЕРАТОР DAREA……………………………………………………………………7 - 24 ПРИМЕР ОПЕРАТОРА DAREA.……………………………………………………..7 - 25 СТАТИЧЕСКАЯ НАГРУЗКА – НЕПРЯМОЙ МЕТОД ЗАДАНИЯ..………………7 - 26
 СТАТИЧЕСКАЯ НАГРУЗКА – ПРЯМОЙ МЕТОД ЗАДАН")
Анализ переходного процесса (продолж.) СТАТИЧЕСКАЯ НАГРУЗКА – ПРЯМОЙ МЕТОД ЗАДАНИЯ..………………….…7 - 28 ЗАМЕЧАНИЯ К СПОСОБУ ЗАДАНИЮ ВНЕШНЕГО ВОЗДЕЙСТВИЯ………….7 - 30 НАЧАЛЬНЫЕ УСЛОВИЯ.………………………………………………………………..7 - 32 ОПЕРАТОР TSTEP…...…………………………………………………………………...7 - 35 МЕТОДЫ ВЫЧИСЛЕНИЯ РЕЗУЛЬТАТОВ...…………………………………………7 - 38 ПРИМЕНЕНИЕ МОДАЛЬНОГО И ПРЯМОГО МЕТОДОВ АНАЛИЗА..…………..7 - 39 УПРАВЛЕНИЕ РЕШЕНИЕМ ПРИ АНАЛИЗЕ ПЕРЕХОДНОГО ПРОЦЕССА..…..7 - 40 ВИДЫ ВЫЧИСЛЯЕМЫХ ВЕЛИЧИН………..………………………………………….7 - 42 ПРИМЕР №3 – АНАЛИЗ ПЕРЕХОДНОГО ПРОЦЕССА ПРЯМЫМ МЕТОДОМ…7 - 43 ВХОДНОЙ ФАЙЛ ДЛЯ ПРИМЕРА №3….………………………………………….7 - 45 РЕЗУЛЬТАТЫ РЕШЕНИЯ ПРИМЕРА №3…….…………………………………..7 - 46 ПРИМЕР №4 – АНАЛИЗ ПЕРЕХОДНОГО ПРОЦЕССА МОДАЛЬНЫМ МЕТОДОМ………………………………………………………………………...…………7 - 51 ВХОДНОЙ ФАЙЛ ДЛЯ ПРИМЕРА №4.…………………………………………….7 - 53 РЕЗУЛЬТАТЫ РЕШЕНИЯ ПРИМЕРА №4..………………………………………..7 - 55

Введение в анализ переходного процесса Вычисление отклика на воздействие, зависящее от времени. Воздействие в явной форме зависит от времени. Все приложенные воздействия известны в любой момент времени. Вычисляются, обычно перемещения и ускорения узлов, силы и напряжения в элементах. Два типа анализа – прямой и модальный.

Прямой метод анализа Уравнение колебаний Отклик вычисляется в дискретные моменты времени с шагом . Для представления и в дискретные моменты времени используется метод центральных конечных разностей Примечание: эти же уравнения используются в MSC.Nastran для вычисления скоростей и ускорений при подсчете результатов.

Прямой метод анализа Для численного интегрирования используется метод центральных разностей (с учетом осреднения внешнего воздействия по трем последовательным моментам времени)

Прямой метод анализа Решение Решается путем декомпозиции матрицы A1 и умножения на правую часть вышеприведенного уравнения. Метод аналогичен классическому методу Newmark-Beta.

Прямой метод анализа Матрицы M, B и K неизменны во времени. Если t неизменно в продолжении всего решения, то декомпозицию матрицы A1 необходимо выполнять только один раз. При изменении t необходимо произвести повторную декомпозицию матрицы A1 (что может быть затратной операцией). Временной интервал вывода результатов может быть больше шага решения (интегрирования) (например, при шаге решения t = 0,001 с и выводе результатов на каждом пятом шаге интегрирования шаг результатов будет равен 0,005 с).

Демпфирование при прямом методе анализа Матрица демпфирования B составляется из нескольких матриц: где B1 - элементы демпфирования (VISC,DAMP) + B2GG B2 - прямой ввод матриц B2PP + передаточные функции G - коэффициент глобального конструкционного демпфирования (PARAM,G) W3 - характерная частота - рад/с (PARAM,W3) K1 - глобальная матрица жесткости Ge - коэффициент конструкционного демпфирования в элементе (параметр GE в операторе MATi) W4 - характерная частота - рад/с (PARAM,W4) KE - матрица жесткости элемента В анализе переходного процесса не допустимы комплексные коэффициенты. Поэтому конструкционное демпфирование учитывается введением эквивалентного вязкого демпфирования. По умолчанию значения параметров W3, W4 равны 0. Если пользователь не задаст им ненулевые значения, соответствующие слагаемые в приведенном уравнении будут игнорироваться.
 Време")
Модальный метод анализа Преобразуем физические координаты в модальные. (1) Временно пренебрежем демпфированием. (2) Подставим уравнение (1) в уравнение (2) (3) Умножим обе части уравнения (2) слева на [ T] (4) где TM - модальная матрица масс (диагональная) TK - модальная матрица жесткости (диагональная) TP - модальный вектор воздействия
 может быть записано как для несвязанной си")
Модальный метод анализа Уравнение (4) может быть записано как для несвязанной системы с одной степенью свободы (СС): (5) где mi - i-я модальная масса ki - i-я модальная жесткость pi - i-ое модальное воздействие

Демпфирование при модальном методе анализа Для матрицы демпфирования B преобразование с использованием собственного вектора не приводит к диагонализации результата: Связанные задачи решаются в модальных координатах методом типа Newmark-Beta (аналогичного используемому при прямом анализе). где

Демпфирование при модальном методе анализа При использовании модального демпфирования каждая мода имеет коэффициент демпфирования bi. Уравнения колебаний становятся несвязанными

Демпфирование при модальном методе анализа Модальный отклик несвязанной системы с одной СС вычисляется с помощью интеграла Дюамеля. Интеграл Дюамеля:

Демпфирование при модальном методе анализа Наиболее эффективно использовать модальное демпфирование, поскольку при этом уравнения несвязанные Оператор TABDMP1 задает коэффициент модального демпфирования. Type = G (по умолчанию), CRIT или Q Например: для демпфирования, составляющего 10% от критического

Демпфирование при модальном методе анализа Оператор TABDMP1 в Bulk Data Section инициируется оператором SDAMPING в Case Control Section. fi (в Гц) и gi составляют пару “частота - демпфирование”. Демпфирование для мод собственных колебаний определяется линейной интерполяцией (за пределами таблицы производится линейная экстраполяция). ENDT – символ конца таблицы. Например: моды имеют частоты 1,0; 2,5; 3,6 и 5,5 Гц. Может быть добавлено также немодальное демпфирование (PARAM, G; VISC; DAMP; GE в операторе MATi) Вследствие связанности уравнений будет применено прямое интегрирование и вычислительные затраты вырастут Практическая рекомендация: при модальном анализе переходного процесса используйте только модальное демпфирование (TABDMP1). Если необходимо дискретное демпфирование – используйте прямой анализ.

Вычисление результатов при модальном методе анализа Результат расчета в физических координатах вычисляется путем суммирования модальных откликов. Вычислительные затраты при изменении t при модальном методе не столь высоки, как при прямом методе. Однако, по-прежнему рекомендуется постоянное значение t. Шаг вывода результатов может быть больше шага решения (интегрирования).

Управление модами Могут быть необходимыми не все вычисленные моды. Часто только небольшого количество низших мод достаточно для вычисления динамического отклика. Оператор PARAM,LFREQ задает нижнюю границу частотного диапазона учитываемых мод. Оператор PARAM,HFREQ задает верхнюю границу частотного диапазона учитываемых мод. Оператор PARAM,LMODES задает количество низших мод, учитываемых при расчете. Неучет высших мод обуславливает отсутствие в отклике высокочастотных составляющих.

Задание внешнего воздействия Задание воздействия как функции времени. В MSC.Nastran предусматриваются различные методы: TLOAD1 - “грубая сила”: табличное задание “время-сила” TLOAD2 - эффективное аналитическое задание LSEQ - конвертация статических нагрузок в динамические
 пространст")
Оператор TLOAD1 Задает воздействие в форме: где A - оператор (символ) пространственного распределения воздействия и масштабного фактора (DAREA, статическая нагрузка, тепловая нагрузка или LSEQ) - временной сдвиг (оператор DELAY) F(t- ) - таблица (оператор TABLEDi) Оператор DELAY задает СС и временной сдвиг (может использоваться только с оператором DAREA). Оператор TABLEDi задает пары “время- воздействие”. Оператор TLOAD1 инициируется оператором DLOAD в Case Control Section.

Оператор TLOAD1 Тип воздействия задается параметром TYPE. В этом разделе будет рассматриваться воздействие только силовыми факторами (первый ряд таблицы). Вынужденные перемещения – см. Раздел 12.
 пространстве")
Оператор TLOAD2 Задает воздействие в форме: где A оператор (символ) пространственного распределения воздействия и масштабного фактора (DAREA, статическая нагрузка, тепловая нагрузка или LSEQ) задается оператором DELAY (может использоваться только с оператором DAREA) TYPE задается как в операторе TLOAD1 T1,T2 временные константы (T2>T1) F частота (Гц) P фазовый угол (градусы) C экспоненциальный коэффициенты B показатель степени Оператор TLOAD2 инициируется оператором DLOAD в Case Control Section.

Комбинация нагрузок – оператор DLOAD Эффективное воздействие PC является суммой различных компонентов нагрузки PK где SC – глобальный масштабный фактор SK – масштабный фактор для k-го компонента PK – идентификатор оператора TLOAD Операторы TLOAD1 и TLOAD2 должны иметь уникальные идентификаторы. Оператор DLOAD “объединяет” операторы TLOADi. Оператор DLOAD в Bulk Data Section инициируется оператором DLOAD в Case Control Section.

Оператор DAREA Определяет степени свободы, к которым прикладывается нагрузка, и соответствующий масштабный фактор. “Взаимоотношения” с другими операторами:

Пример оператора DAREA DLOAD = 35 Результат: нагрузка, задаваемая оператором TLOAD1, умножается на 5,2, “сдвигается” по времени (в сторону запаздывания) на 0,2с и прикладывается к узлу 30 в направлении оси X (компонент T1).

Статическая нагрузка – непрямой метод задания Задание статических нагрузок, прикладываемых “динамически”. Оператор LSEQ в Bulk Data Section инициируется оператором LOADSET в Case Control Section. Оператор LSEQ заменяет оператор DAREA, задавая идентификатор статической нагрузки. Взаимодействие операторов между собой DLOAD LOADSET Case Control Bulk Data TLOAD DLOAD LSEQ Динамика Идентификатор Статическая нагрузка Зависимость от времени Перекрестная Пространственное ссылка распределение

Статическая нагрузка – непрямой метод задания DLOAD = 25 LOADSET = 27 TLOAD1 25 28 LSEQ 27 28 100 PLOAD4 100 ….

Статическая нагрузка – прямой метод задания Задание статических нагрузок, прикладываемых “динамически”. Идентификатор непосредственно инициирует статическую нагрузку (например, PLOAD4) DLOAD Case Control Bulk Data TLOAD Динамика Идентификатор Зависимость от времени Статическая нагрузка

Статическая нагрузка – прямой метод задания DLOAD = 25 TLOAD1 25 100 PLOAD4 100 …..

Замечания к способу задания внешнего воздействия Учитывайте осреднение нагрузок (1/3). Это сделает нагрузки более плавными и уменьшит влияние погрешностей. Избегайте “разрывов” в нагрузках. Это может приводить к различиям в результатам расчетов, выполняемых на разных ЭВМ. Если N· t = t(ABC), тогда MSC.Nastran вычислит: Force = (A+C)/2 = B. Однако, вследствие ошибок округления, на одной ЭВМ N· t = t(A-) и тогда Force = A. На другой ЭВМ может быть N· t = t(C+) и тогда Force = C. Результаты интегрирования будут различными в зависимости от того, чему равно N· t: A, B или C.

Замечания к способу задания внешнего воздействия Сгладьте разрыв в силе на участке в один шаг t.

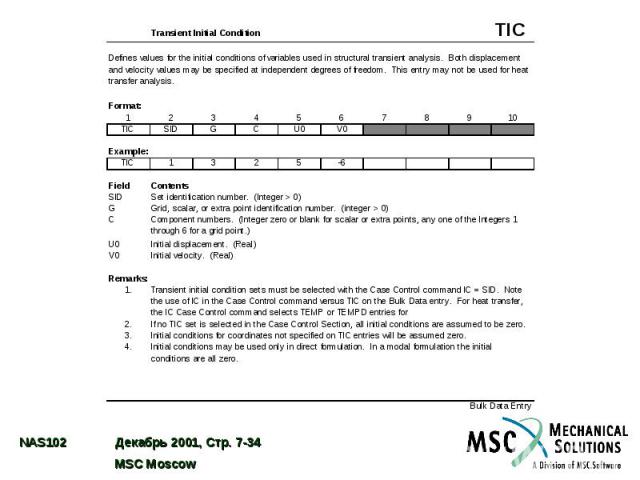
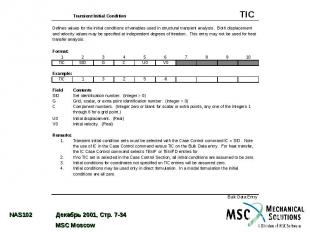
Начальные условия Начальные значения перемещений и/или скоростей можно учесть при использовании прямого метода анализа переходного процесса с помощью оператора TIC в Bulk Data Section. В стандартном модальном методе анализа учесть ненулевые начальные условия нельзя. Оператор TIC инициируется оператором IC в Case Control Section. Внимание: если начальные условия не указаны – они нулевые. Начальные условия можно задать только для СС, входящих в A-set. Значения {u0}, {u-1}, {P0} и {P-1}, необходимые для вычисления {u1}, определяются с использованием начальных условий, при этом ускорения при t < 0 полагаются равными нулю (скорости постоянны). Нагрузка, заданная пользователем для t = 0, заменяется значением:

Начальные условия Практическая рекомендация: при любом типе динамического воздействия, по-возможности, предусматривать хотя бы один шаг решения с “нулевой” нагрузкой (до того, как ее величина примет действительное значение).

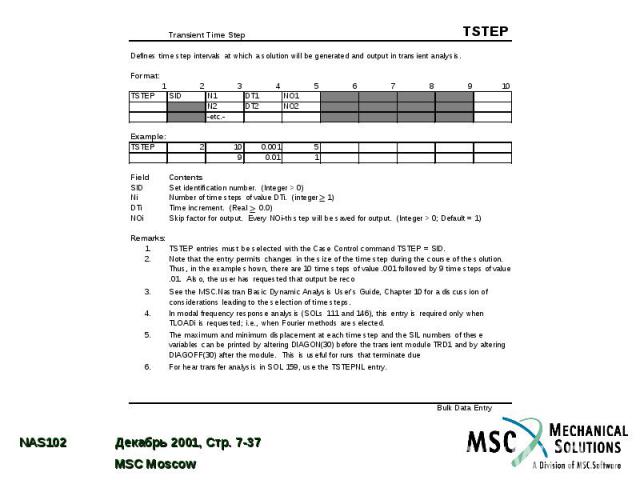
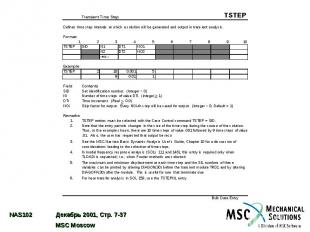
Оператор TSTEP Задает шаг интегрирования для прямого и модального методов анализа. Ошибки интегрирования растут с ростом собственных частот. Рекомендуется, чтобы на периоде самой высокочастотной составляющей отклика укладывалось не меньше восьми шагов t. Оператор TSTEP в Bulk Data Section, задающий шаги решения и вывода результатов, инициируется оператором TSTEP в Case Control Section. Если t постоянен, то затраты на интегрирование прямо пропорциональны количеству шагов по времени. Необходимо задавать длительность моделирования достаточную для исследования низкочастотных составляющих отклика. Пользователь может изменить шаг. Предполагается постоянство при t < N t1 . На базе вычисляются новые начальные условия для продолжения интегрирования начиная с {un}. Допущение постоянства ускорений обеспечивает плавность интегрирования в “переходной” зоне.

Оператор TSTEP Начальные условия для нового этапа интегрирования: Примечание: необходимо снова вычислить матрицы A1 - A4 (см. стр. 7-7), а матрицу A1 - еще и обратить.

Методы вычисления результатов Предусмотрены три метода вычисления перемещений и напряжений в модальном анализе: модальных перемещений, матричный и модальных ускорений. В методе модальных перемещений по ним вычисляются физические перемещения, а затем - определяются напряжения. Количество операций пропорционально количеству шагов по времени (T). В матричном методе вычисляются физические перемещения и напряжения в элементах для каждой моды, а затем вычисляются суммарные перемещения и напряжения как суммы этих величин по всем модам. Вычислительные затраты пропорциональны количеству мод (H). Поскольку обычно H << T, матричный метод “дешевле”. Матричный метод задан “по умолчанию” и рекомендуется для большинства случаев. Метод модальных перемещений может быть инициирован с помощью параметра PARAM, DDRMM, -1. Метод модальных ускорений автоматически задействуется при вычислении квазистатического отклика всех высокочастотных мод (требуется также “подключение” метода модальных перемещений, подробнее - см. Приложение F).

Применение модального и прямого методов анализа

Управление решением при анализе переходного процесса Executive Control Section SOL <см. таблицу> Case Control Section DLOAD (требуется при обоих методах решения) LOADSET (может применяться при обоих методах) METHOD (требуется при модальном методе) SDAMPING (может применяться при модальном методе) IC (может применяться при прямом методе) TSTEP (требуется при обоих методах решения)

Управление решением при анализе переходного процесса Bulk Data Section ASET,OMIT (может применяться при обоих методах) EIGRL or EIGR (требуется при модальном методе) TSTEP (требуется при обоих методах решения) TIC (может применяться при прямом методе) TLOADi (требуется при обоих методах решения) LSEQ (может применяться при обоих методах) TABLEDi (может применяться при обоих методах) DAREA (требуется при обоих методах решения*) DELAY (может применяться при обоих методах) DLOAD (может применяться при обоих методах) TABDMP1 (может применяться при модальном методе) *Идентификатор оператора DAREA необходим; если же применяется оператор LSEQ, то сам оператор DAREA может отсутствовать.

Виды вычисляемых величин Результаты вычислений для узлов ACCELERATION DISPLACEMENT (или VECTOR) GPSTRESS NLLOAD (вывод значений нелинейных нагрузок) OLOAD (вывод значений прилагаемых нагрузок) SACCELERATION (вывод результатов решения для A-set SDISPLACEMENT при прямом методе анализа, для модальных SVELOCITY переменных – при модальном методе анализа) SVECTOR (вывод результатов вычислений собственных форм для A-set) SPCFORCES VELOCITY MPCFORCE Результаты вычислений для элементов ELSTRESS (или STRESS) ELFORCE (или FORCE) STRAIN Специальный оператор OTIME (задание моментов времени, в которые должны выводиться результаты; работает совместно с оператором TSTEP)

Пример №3 Анализ переходного процесса прямым методом

Пример №3. Анализ переходного процесса прямым методом Используя модель из Примера №1, прямым методом определите колебания плоской пластины под действием возмущения, зависящего от времени. Конструкция нагружается давлением 1 фунт/кв. дюйм, изменяющимся с f=250 Гц, а также силой в 50 фунтов, приложенной к углу пластины и изменяющейся с f=250 Гц и сдвинутой по фазе на 180o относительно давления. Длительность действия обоих возмущений -0,008 с. Конструкционное демпфирование g=0,06. Указанное демпфирование конвертировать в вязкое на частоте 250 Гц. Длительность процесса 0,04 с. Рис. 7-1. Нагрузки и граничные условия.

Входной файл для Примера №3

Результаты решения Примера №3

Результаты решения Примера №3

Результаты решения Примера №3

Результаты решения Примера №3

Результаты решения Примера №3

Пример №4 Анализ переходного процесса модальным методом

Пример №4. Анализ переходного процесса модальным методом Используя модель из Примера №1, модальным методом определите колебания плоской пластины под действием возмущения, зависящего от времени. Конструкция нагружается давлением 1 фунт/кв. дюйм, изменяющимся с f=250 Гц, а также силой в 25 фунтов, приложенной к углу пластины и изменяющейся с f=250 Гц. Сила прикладывается начиная с 0,004 с. Действие обоих возмущений заканчивается через 0,008 с. Модальное демпфирование =0,06 для всех мод. Длительность процесса 0,04 с.

Входной файл для Примера №4

Входной файл для Примера №4

Результаты решения Примера №4

Результаты решения Примера №4

Результаты решения Примера №4

Результаты решения Примера №4

Результаты решения Примера №4












