









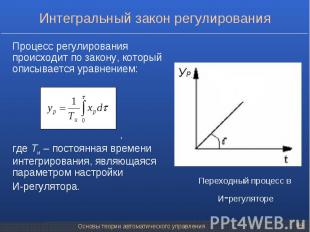
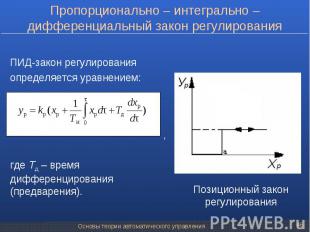
 – воздействие управляющего устройства на объект управления. Управляющее воздействие (u) – воздействие управляющего устройства на объект управления. Управляющее устройство (УУ) – устройство, осуществляющее воздействие на о…")
 – комплекс устройств, присоединяемых к регулируемому объекту и обеспечивающих автоматическое поддержание заданного значения его регулируемой величины или автоматическое изменение ее по определенному закону. Регулятор (Р) – комплек…")
 и адаптивные (или приспосабливающиеся) системы. 1. По методу управления АСУ подразделяются на неадаптивные (или не приспосабливающиеся) и адаптивные (и…")

. 4. По числу регулируемых величин АСУ делятся на одномерные и многомерные (или многосвязные). 5. По характеру изменения регулирующих воздействий во времени А…")

 описывает изменение во времени выходной величины при изменении входной величины, т. е. переходный процесс в элементе (системе). Динамическая характеристика (уравнение динамики) описывает изменение во …")
 к X(p) называется прямым преобразованием Лапласа и обозначается символом L: Операция перехода от X(p) к x(t) называется обратным преобразованием Лапласа и обозначается символом L-1:")


. . Зависимость Re ) называют действительной частотной…")


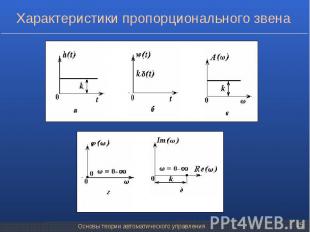
 от входной x(t) в любой момент времени t: y(t)=kx(t), Пропорциональное звено описывается уравнением пропорциональной связи выходной величины y(t) от входной …")

 характер переходного процесса и описывается уравнением Апериодическое звено 1-го порядка имеет неколебательный (апериодический) характер переходного процесса и описывается урав…")
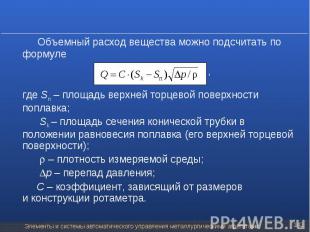
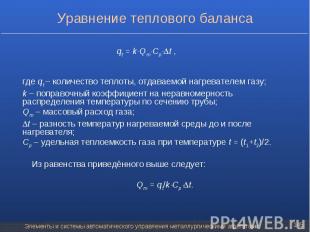
; k – коэфф…")












 повернется против часовой стрелки на угол n /2, не обращаясь при этом в нуль. Это означает, что хар…")
 разомкнутого контура не охватывает точку с координатами (– 1; j0). Автоматическая система управления устойчива, если амплитудно-фазовая характеристика W(j ) ра…")








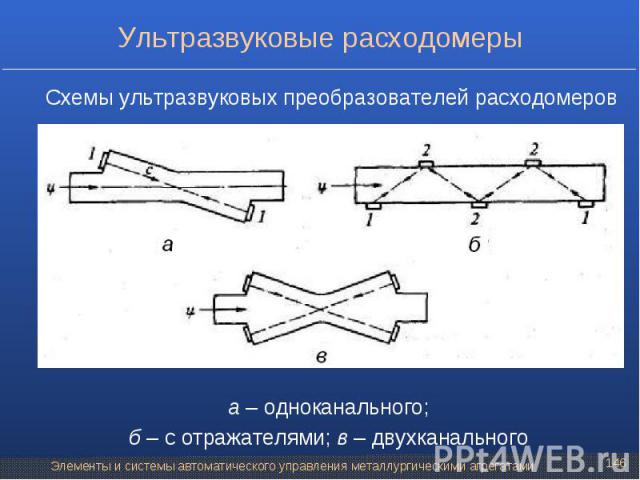
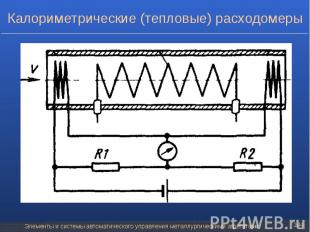
 расходомеры Калориметрические (тепловые) расходомеры Ультразвуковые расходомеры Измерение уровня Поплавковые уровнемеры Гидростатические уровнемеры Ультразвуковые и радиолокационные уровнемеры Приборы для измерения уровн…")






























































; 1 – сетевой адаптер (устройство сопряжения); 2 – узел коммутации")


; автоматизированные системы управления технологическими процессами (АСУ ТП). К АСУП от…")


Презентация на тему: автоматизация металлургических производств




Основы теории автоматического управления Элементы и системы автоматического управления металлургическими агрегатами и процессами Элементы проектирования систем автоматизации Автоматизированные системы управления технологическими процессами Автоматизированные системы управления предприятием

Основные понятия Основные понятия Классификация систем управления и регулирования Статические и динамические характеристики элементов и систем Преобразование Лапласа, передаточная функция Временные динамические характеристики Частотные характеристики Типовые звенья АСР и их характеристики, передаточные функции Пропорциональное звено Интегрирующее звено Апериодическое звено 1-го порядка Колебательное звено Дифференцирующее звено Звено чистого запаздывания Соединения звеньев

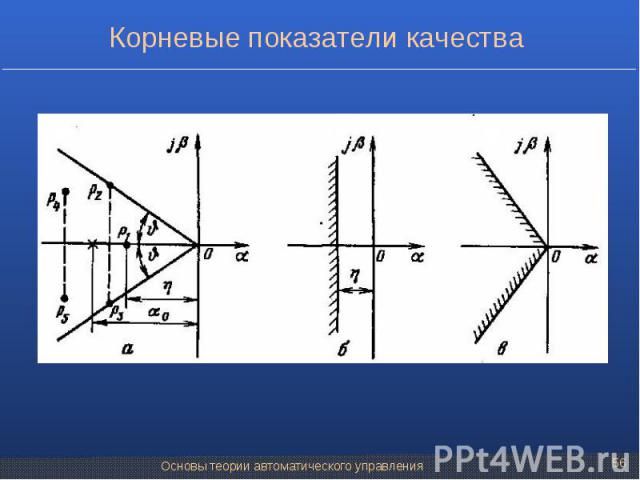
Автоматические регуляторы, типовые законы регулирования Автоматические регуляторы, типовые законы регулирования Предварительный выбор структуры системы регулирования Стандартные законы регулирования Понятие устойчивости АСР Алгебраические критерии устойчивости Критерий Михайлова Критерий Найквиста Методы исследования качества переходного процесса Прямые показатели Частотные показатели Корневые показатели Модели объектов регулирования и методы их получения

Физические величины, определяющие ход технологического процесса, называются параметрами технологического процесса. Физические величины, определяющие ход технологического процесса, называются параметрами технологического процесса. Параметр технологического процесса, который необходимо поддерживать постоянным или изменять по определенному закону, называется регулируемой величиной или регулируемым параметром.

Значение регулируемой величины в рассматриваемый момент времени называется мгновенным значением. Значение регулируемой величины в рассматриваемый момент времени называется мгновенным значением. Значение регулируемой величины, полученное в рассматриваемый момент времени на основании данных некоторого измерительного прибора называется ее измеренным значением. Объект управления (объект регулирования, ОУ) – устройство, требуемый режим работы которого должен поддерживаться извне специально организованными управляющими воздействиями. Управление – формирование управляющих воздействий, обеспечивающих требуемый режим работы ОУ.

Регулирование – частный вид управления, когда задачей является обеспечение постоянства какой-либо выходной величины ОУ. Регулирование – частный вид управления, когда задачей является обеспечение постоянства какой-либо выходной величины ОУ. Автоматическое управление – управление, осуществляемое без непосредственного участия человека. Входное воздействие (Х) – воздействие, подаваемое на вход системы или устройства. Выходное воздействие (Y) – воздействие, выдаваемое на выходе системы или устройства. Внешнее воздействие – воздействие внешней среды на систему. Задающее воздействие (то же, что входное воздействие Х) – воздействие на систему, определяющее требуемый закон изменения регулируемой величины.
 – воздействие управляющего устройства на объект упра")
Управляющее воздействие (u) – воздействие управляющего устройства на объект управления. Управляющее воздействие (u) – воздействие управляющего устройства на объект управления. Управляющее устройство (УУ) – устройство, осуществляющее воздействие на объект управления с целью обеспечения требуемого режима работы. Возмущающее воздействие (f) – воздействие, стремящееся нарушить требуемую функциональную связь между задающим воздействием и регулируемой величиной. Ошибка управления ( e=x–y ) – разность между предписанным (х) и действительным (у) значениями регулируемой величины.
 – комплекс устройств, присоединяемых к регулируемому объекту и&nbs")
Регулятор (Р) – комплекс устройств, присоединяемых к регулируемому объекту и обеспечивающих автоматическое поддержание заданного значения его регулируемой величины или автоматическое изменение ее по определенному закону. Регулятор (Р) – комплекс устройств, присоединяемых к регулируемому объекту и обеспечивающих автоматическое поддержание заданного значения его регулируемой величины или автоматическое изменение ее по определенному закону. Автоматическая система регулирования (АСР) – автоматическая система с замкнутой цепью воздействия, в котором управление (u) вырабатывается в результате сравнения истинного значения (у) с заданным значением (х).

1. По методу управления АСУ подразделяются на неадаптивные (или не приспосабливающиеся) и адаптивные (или приспосабливающиеся) системы. 1. По методу управления АСУ подразделяются на неадаптивные (или не приспосабливающиеся) и адаптивные (или приспосабливающиеся) системы. Неадаптивные АСУ: Адаптивные АСУ: - стабилизирующие - экстремальные - программные - оптимальные - следящие

2. По характеру использования информации АСУ и АСР делят на замкнутые и разомкнутые системы. 2. По характеру использования информации АСУ и АСР делят на замкнутые и разомкнутые системы. Разомкнутые АСР: - с жесткой программой - с регулированием по возмущению 3. По результатам работы в установившемся состоянии системы делятся на астатические и статические.

4. По числу регулируемых величин АСУ делятся на одномерные и многомерные (или многосвязные). 4. По числу регулируемых величин АСУ делятся на одномерные и многомерные (или многосвязные). 5. По характеру изменения регулирующих воздействий во времени АСУ делятся на непрерывные и прерывистые (дискретные). Дискретные АСУ: - релейные - импульсные - цифровые

6. По виду энергии, применяемой для работы, АСУ делятся на системы прямого и косвенного действия. 6. По виду энергии, применяемой для работы, АСУ делятся на системы прямого и косвенного действия. АСУ косвенного действия: - гидравлические - пневматические - электрические 7. По виду дифференциального уравнения различают линейные и нелинейные АСУ.
 описывает изменение во времени")
Динамическая характеристика (уравнение динамики) описывает изменение во времени выходной величины при изменении входной величины, т. е. переходный процесс в элементе (системе). Динамическая характеристика (уравнение динамики) описывает изменение во времени выходной величины при изменении входной величины, т. е. переходный процесс в элементе (системе). Статическая характеристика (уравнение статики) отражает функциональную связь между выходной и входной величинами в установившемся режиме.
 к X(p) называется прямым преобразованием Лапласа и обо")
Операция перехода от x(t) к X(p) называется прямым преобразованием Лапласа и обозначается символом L: Операция перехода от X(p) к x(t) называется обратным преобразованием Лапласа и обозначается символом L-1:

Применяя прямое преобразование Лапласа к линейным неоднородным дифференциальным уравнениям n-го порядка с постоянными коэффициентами, получим Применяя прямое преобразование Лапласа к линейным неоднородным дифференциальным уравнениям n-го порядка с постоянными коэффициентами, получим Взяв отношение изображений выходной и входной величин из предыдущего уравнения, получим передаточную функцию , где полиномы знаменателя и числителя имеют вид

Зависимость выходной величины элемента или системы от времени при переходе из одного установившегося состояния в другое при поступлении на вход типового воздействия называется временной динамической характеристикой. Зависимость выходной величины элемента или системы от времени при переходе из одного установившегося состояния в другое при поступлении на вход типового воздействия называется временной динамической характеристикой. Единичная ступенчатая и единичная импульсная функция

Отношение изображений по Фурье выходной и входной величин, равное Отношение изображений по Фурье выходной и входной величин, равное , называется амплитудно-фазовой характеристикой (АФХ). . Зависимость Re ) называют действительной частотной характеристикой, а зависимость Im( ) – мнимой частотной характеристикой.


1. Пропорциональное звено. 1. Пропорциональное звено. 2. Интегрирующее звено. 3. Апериодическое звено 1-го порядка. 4. Колебательное звено. 5. Дифференцирующее звено. 6. Звено чистого запаздывания. Элементарным звеном называется такое звено, которое нельзя разделить на более простые звенья.

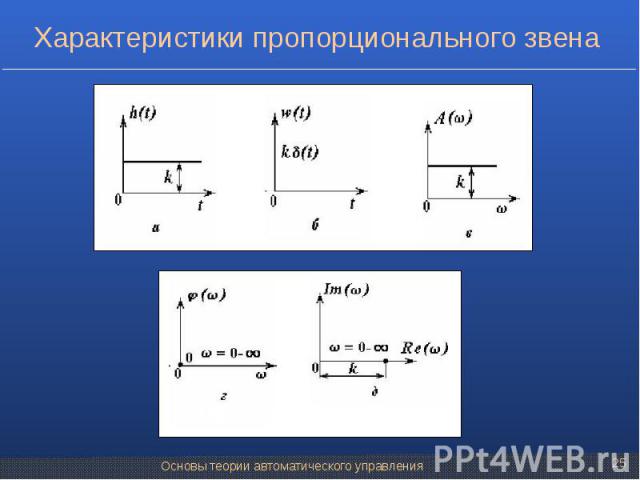
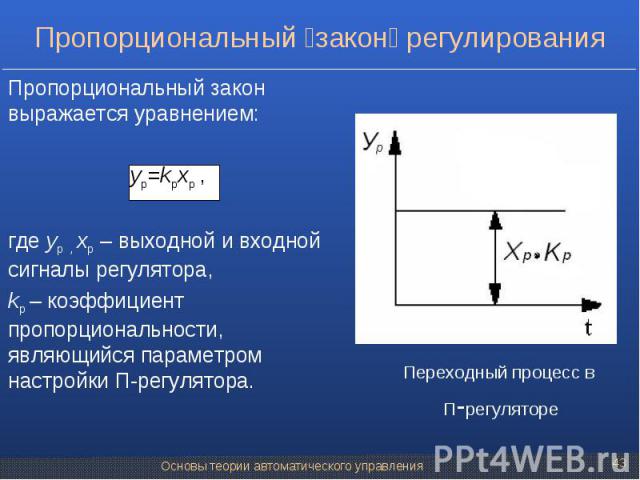
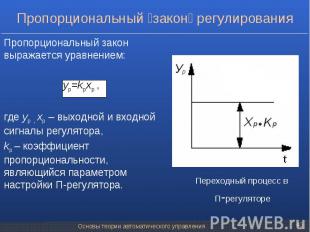
Пропорциональное звено описывается уравнением пропорциональной связи выходной величины y(t) от входной x(t) в любой момент времени t: y(t)=kx(t), Пропорциональное звено описывается уравнением пропорциональной связи выходной величины y(t) от входной x(t) в любой момент времени t: y(t)=kx(t), где k - коэффициент передачи, имеющий размерность отношения единиц выходной величины к входной. Передаточная функция .

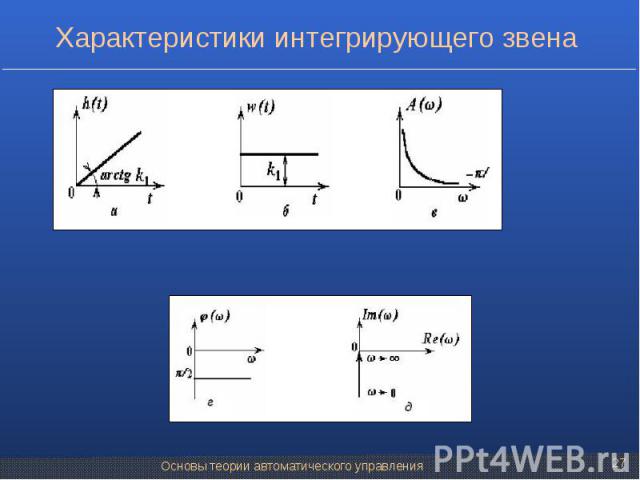
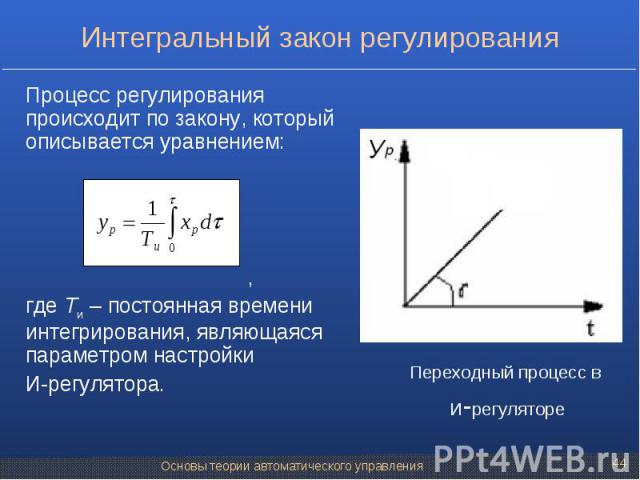
Интегрирующее звено описывается уравнением Интегрирующее звено описывается уравнением . Передаточная функция интегрирующего звена: .

 характе")
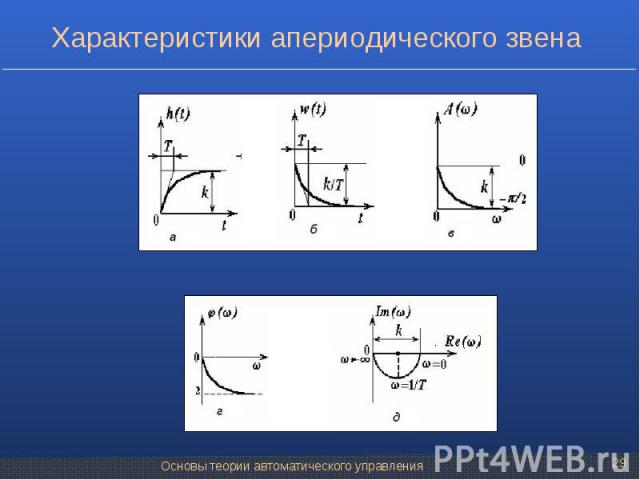
Апериодическое звено 1-го порядка имеет неколебательный (апериодический) характер переходного процесса и описывается уравнением Апериодическое звено 1-го порядка имеет неколебательный (апериодический) характер переходного процесса и описывается уравнением , где k – коэффициент передачи, T – постоянная времени, с. Передаточная функция .


Колебательное звено имеет колебательный переходной процесс и описывается уравнением Колебательное звено имеет колебательный переходной процесс и описывается уравнением где T – постоянная времени, с; x – коэффициент затухания (безразмерен); k – коэффициент передачи. Передаточная функция звена


Идеальное дифференцирующее звенo описывается уравнением Идеальное дифференцирующее звенo описывается уравнением , то есть выходная величина пропорциональна скорости изменения входной величины. Передаточная функция звена , где k2 – коэффициент передачи.


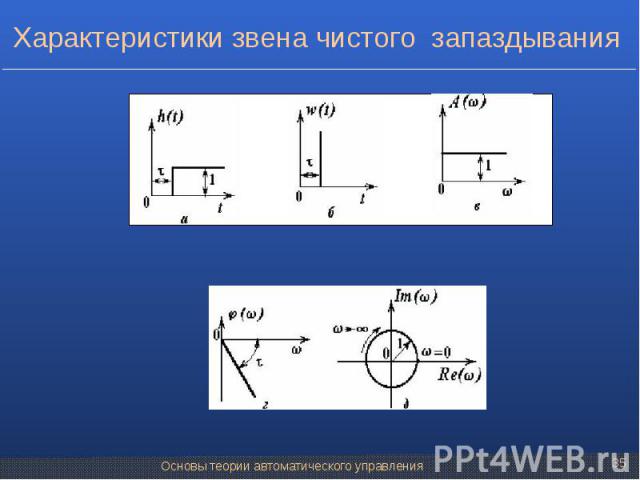
В звене чистого запаздывания выходная величина точно повторяет изменения входной величины, но с некоторым отставанием по времени t, называемым временем чистого запаздывания : В звене чистого запаздывания выходная величина точно повторяет изменения входной величины, но с некоторым отставанием по времени t, называемым временем чистого запаздывания : . Передаточная функция звена запаздывания : .


Различают три типа соединения звеньев: последовательное, параллельное и с обратной связью. Различают три типа соединения звеньев: последовательное, параллельное и с обратной связью. Последовательным называют такое соединение, при котором выходная величина предыдущего звена является входной величиной последующего звена. Передаточная функция системы последовательно соединенных звеньев равна произведению передаточных функций отдельных звеньев: .

При параллельном соединении звеньев на вход всех звеньев поступает одна и та же входная величина x, а выходная величина равна сумме выходных величин отдельных звеньев. При параллельном соединении звеньев на вход всех звеньев поступает одна и та же входная величина x, а выходная величина равна сумме выходных величин отдельных звеньев. Передаточная функция системы параллельно соединенных звеньев равна сумме передаточных функций отдельных звеньев:

Передаточная функция системы при охвате звена обратной связи: Передаточная функция системы при охвате звена обратной связи: Знак “минус” соответствует положительной обратной связи, знак “плюс” – отрицательной обратной связи.




Устойчивость автоматической системы – это свойство системы возвращаться в исходное состояние равновесия после прекращения воздействия, выведшего систему из этого состояния. Неустойчивая система не возвращается в исходное состояние, а непрерывно удаляется от него. Устойчивость автоматической системы – это свойство системы возвращаться в исходное состояние равновесия после прекращения воздействия, выведшего систему из этого состояния. Неустойчивая система не возвращается в исходное состояние, а непрерывно удаляется от него. Общее условие устойчивости – для устойчивости линейной автоматической системы управления необходимо и достаточно, чтобы вещественные части всех корней характеристического уравнения системы были отрицательными.

Автоматическая система, описываемая характеристическим уравнением , устойчива, если при a0>0 положительны все определители 1, 2. . . , n вида Автоматическая система, описываемая характеристическим уравнением , устойчива, если при a0>0 положительны все определители 1, 2. . . , n вида . Если хотя бы один из определителей, называемых определителями Гурвица, отрицателен, то система неустойчива.

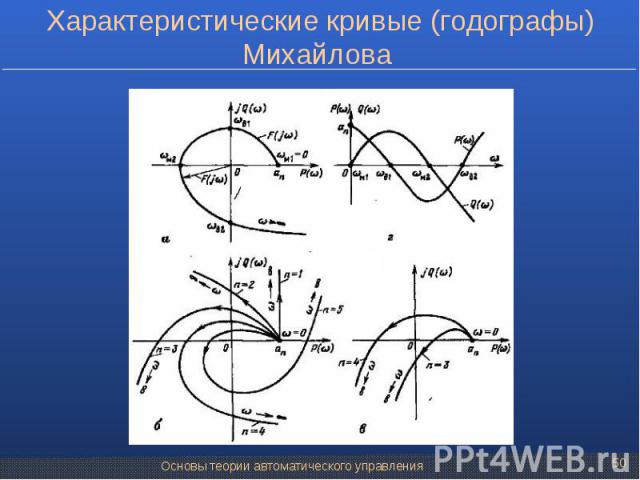
Автоматическая система управления, описываемая уравнением n-го порядка, устойчива, если при изменении от 0 до характеристический вектор системы F(j ) повернется против часовой стрелки на угол n /2, не обращаясь при этом в нуль. Это означает, что характеристическая кривая устойчивой системы должна при изменении от 0 до пройти последовательно через n квадрантов.


Автоматическая система управления устойчива, если амплитудно-фазовая характеристика W(j ) разомкнутого контура не охватывает точку с координатами (– 1; j0). Автоматическая система управления устойчива, если амплитудно-фазовая характеристика W(j ) разомкнутого контура не охватывает точку с координатами (– 1; j0). Эта формулировка справедлива для систем, которые в разомкнутом состоянии устойчивы.

1 – устойчивая; 2 – находящаяся на границе устойчивости; 3 – неустойчивая система

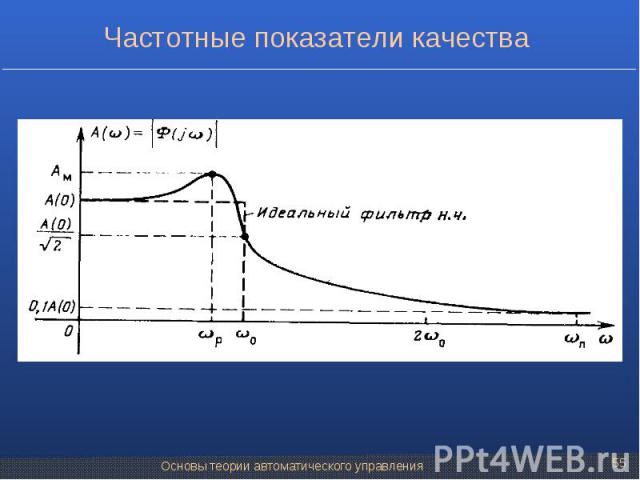
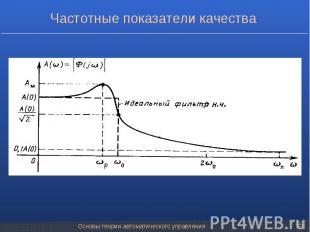
Свойства системы, выраженные в количественной форме, называют показателями качества управления. Свойства системы, выраженные в количественной форме, называют показателями качества управления. Точность системы в переходных режимах оценивают при помощи прямых и косвенных показателей. Прямые показатели определяют по графику переходного процесса, возникающего в системе при ступенчатом внешнем воздействии. Косвенные показатели качества определяют по распределению корней характеристического уравнения или по частотным характеристикам системы.

а по каналу задания; б по каналу возмущения а по каналу задания; б по каналу возмущения


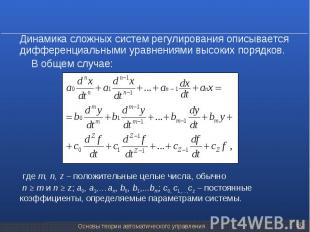
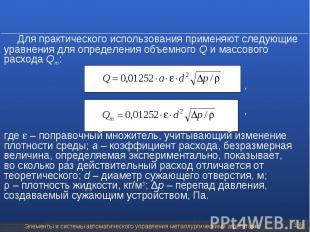
Совокупность математических уравнений, отражающих взаимосвязь выходных и входных величин объекта, дополненная ограничениями, накладываемыми на эти величины условиями их физической реализации и безопасной эксплуатации, представляют собой математическую модель (математическое описание) объекта. Совокупность математических уравнений, отражающих взаимосвязь выходных и входных величин объекта, дополненная ограничениями, накладываемыми на эти величины условиями их физической реализации и безопасной эксплуатации, представляют собой математическую модель (математическое описание) объекта. В соответствии с физической сущностью процессов, протекающих в объекте, математические модели делятся на детерминированные и стохастические.

а – линейная; б – нелинейная а – линейная; б – нелинейная



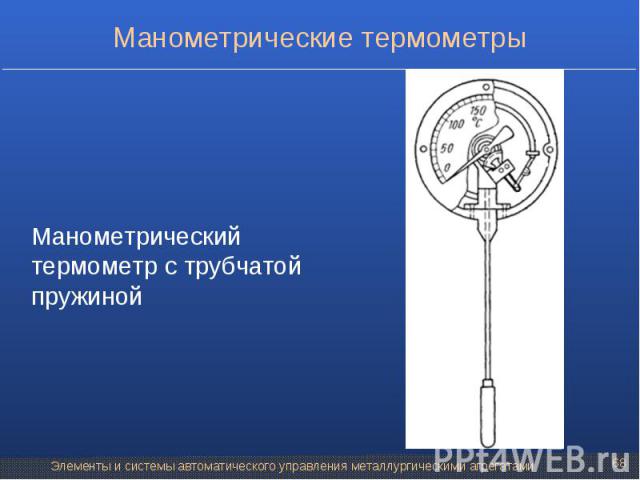
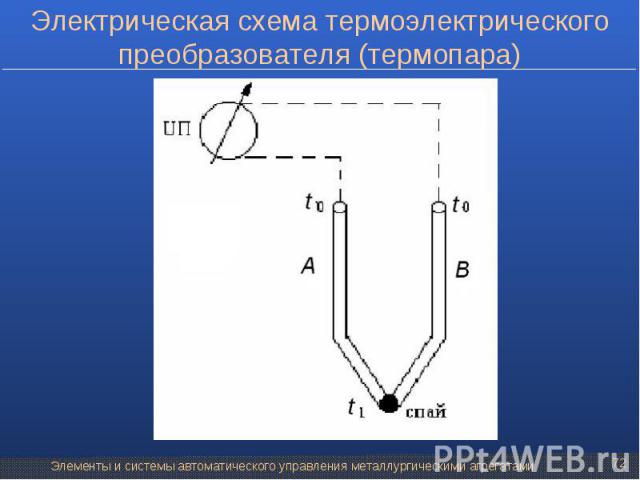
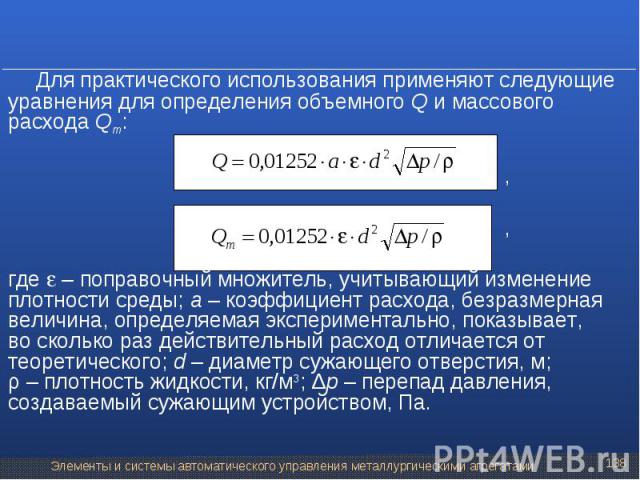
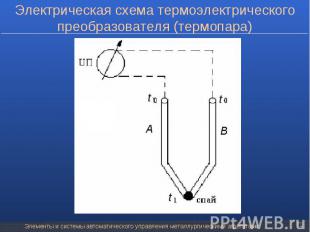
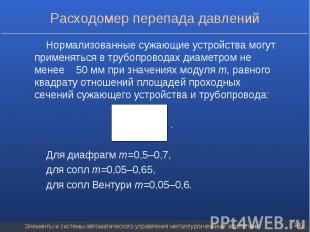
Измерение температуры Измерение температуры Бесконтактные методы измерения температуры Манометрические термометры Электрические термометры сопротивления и приборы, работающие в комплекте с ними Термоэлектрические термометры и приборы, работающие в комплекте с ними Бесконтактные методы измерения температуры Виды пирометров Измерение давления Измерение расхода, количества жидкостей и газов Расходомеры переменного перепада давления Расходомеры постоянного перепада давления Электромагнитные расходомеры
 расходомеры Калориметрические (тепловые) расходомер")
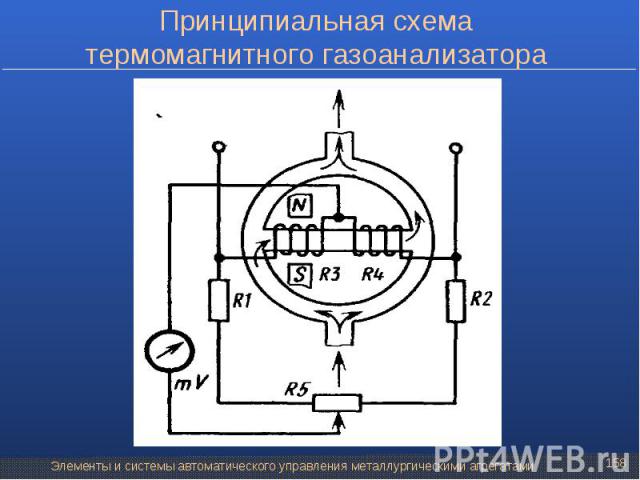
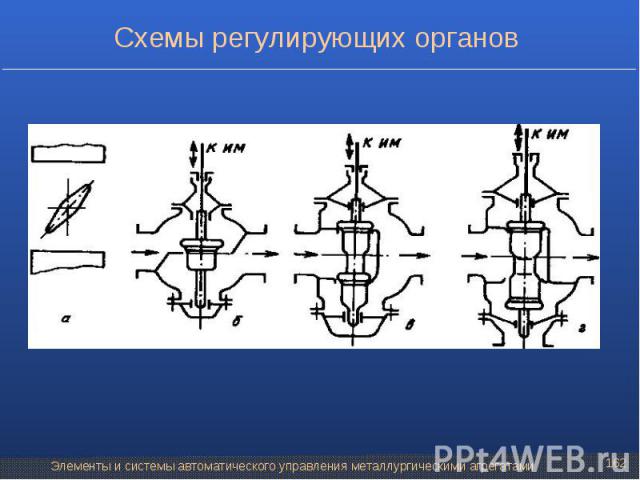
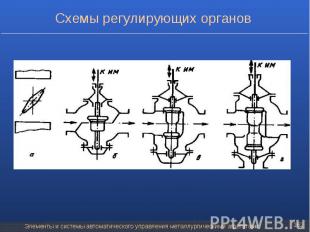
Калориметрические (тепловые) расходомеры Калориметрические (тепловые) расходомеры Ультразвуковые расходомеры Измерение уровня Поплавковые уровнемеры Гидростатические уровнемеры Ультразвуковые и радиолокационные уровнемеры Приборы для измерения уровня сыпучих материалов Измерение химического состава газов и жидкостей Термомагнитные газоанализаторы Измерение ионного состава растворов и жидкой фазы пульп Исполнительные механизмы Регулирующие органы














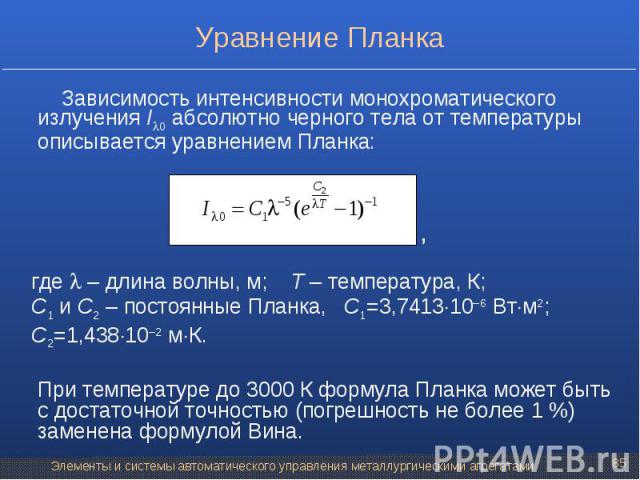
Температура реального тела, измеряемая радиационными пирометрами называется радиационной Тр. При этой температуре полная мощность излучения абсолютно черного тела равна полной мощности излучения реального тела при истинной температуре Т. Температура реального тела, измеряемая радиационными пирометрами называется радиационной Тр. При этой температуре полная мощность излучения абсолютно черного тела равна полной мощности излучения реального тела при истинной температуре Т. Закон Стефана – Больцмана: .





















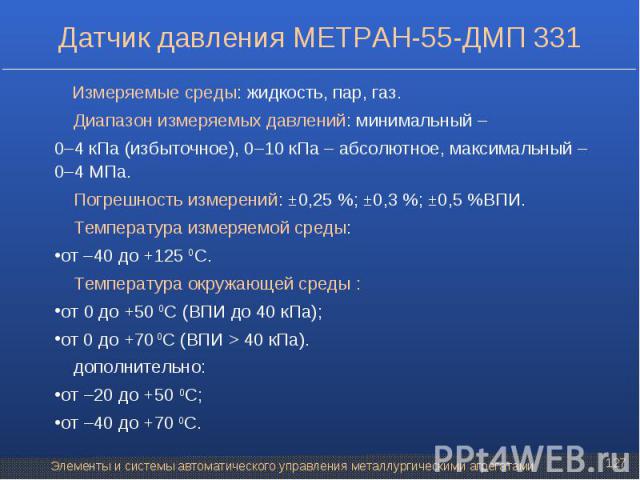
Коррозионностойкие интеллектуальные датчики давления Метран-49 предназначены для работы в системах автоматического контроля, регулирования, управления технологическими процессами и обеспечивают непрерывное преобразование в унифицированный аналоговый токовый выходной сигнал и/или цифровой сигнал в стандарте протокола HART. Коррозионностойкие интеллектуальные датчики давления Метран-49 предназначены для работы в системах автоматического контроля, регулирования, управления технологическими процессами и обеспечивают непрерывное преобразование в унифицированный аналоговый токовый выходной сигнал и/или цифровой сигнал в стандарте протокола HART.
















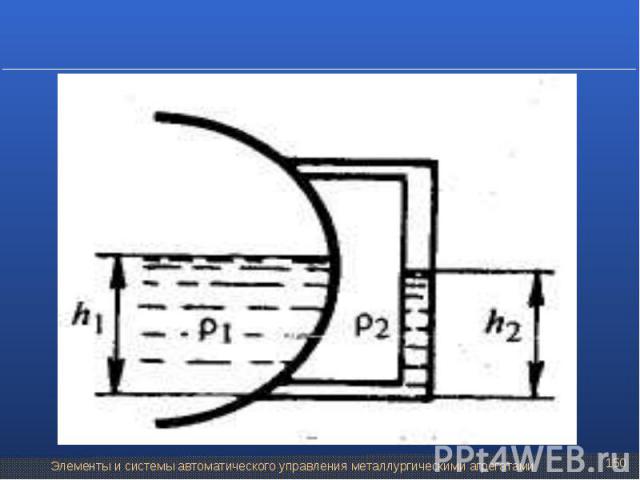
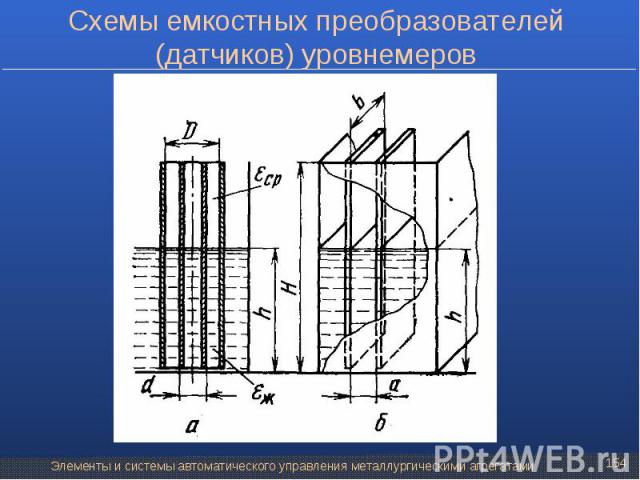
Уровнем называют высоту заполнения технологического аппарата рабочей средой – жидкостью или сыпучим материалом. Уровнем называют высоту заполнения технологического аппарата рабочей средой – жидкостью или сыпучим материалом. Технические средства для измерения уровня называются уровнемерами. Приборы, предназначенные для сигнализации предельных значений уровня рабочей среды, называются сигнализаторами уровня. В производственной практике для измерения уровня применяются указательные стекла, поплавковые, буйковые, гидростатические, электрические, ультразвуковые и радиоизотопные уровнемеры.
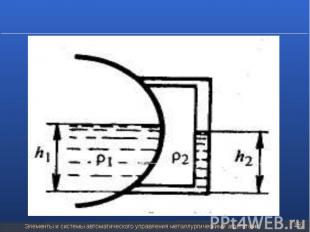


Схема измерения уровня гидростатическим уровнемером Схема измерения уровня гидростатическим уровнемером

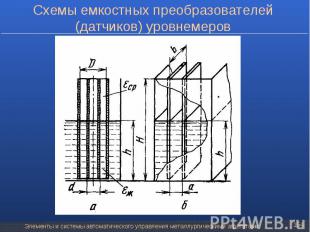



Схема термохимического газоанализатора Схема термохимического газоанализатора



Схемы включения Схемы включения электрических исполнительных механизмов



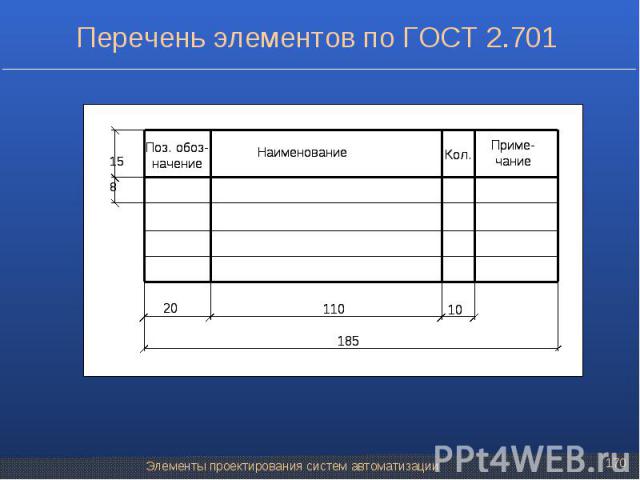
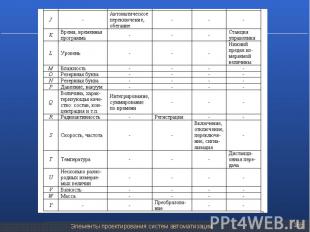
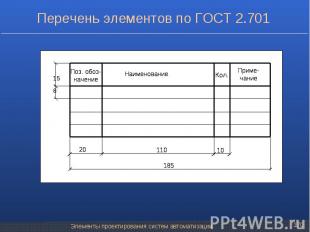
Цели, задачи и стадии проектирования Цели, задачи и стадии проектирования Функциональные схемы автоматизации

Основные разделы технического задания Основные разделы технического задания Условия эксплуатации системы управления. Эксплуатационно-технические характеристики системы управления. Объем выполняемых разработчиком работ. Технические требования к системе управления. Требования к художественно-конструкторскому оформлению системы. Требования к патентной защищенности СУ. Требования к заказчику по обеспечению разработки, внедрения и эксплуатации системы управления.




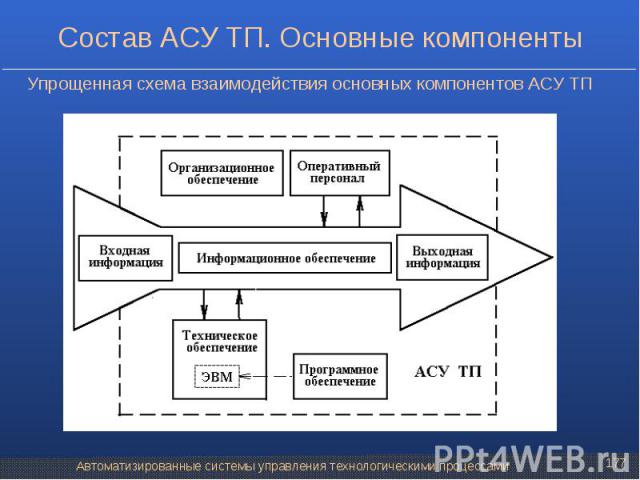
Иерархия управления Иерархия управления Разновидности АСУ ТП Состав АСУ ТП. Основные компоненты Принципы построения распределенных систем контроля и управления

Иерархический принцип управления заключается в многоступенчатой организации процесса, где каждая ступень управления имеет свои объекты и цели. Иерархический принцип управления заключается в многоступенчатой организации процесса, где каждая ступень управления имеет свои объекты и цели. Иерархичность системы, ее многоуровневость обуславливаются сложностью систем управления. Автоматизированные системы управления технологическими процессами (АСУ ТП) вырабатывают и реализуют управляющие воздействия на технологическом объекте управления в соответствии с принятым критерием управления.

АСУ ТП, функционирующие без вычислительного комплекса. АСУ ТП, функционирующие без вычислительного комплекса. АСУ ТП с вычислительным комплексом, выполняющим информационные функции. АСУ ТП с вычислительным комплексом, выполняющим управляющие функции в режиме "советчика". АСУ ТП с вычислительным комплексом, выполняющим функции центрального управляющего устройства (супервизорное управление). АСУ ТП с вычислительным комплексом, выполняющим функции непосредственного (прямого) цифрового управления.


; 1 – сетевой адаптер (устройство соп")
1 – сетевой адаптер (устройство сопряжения); 1 – сетевой адаптер (устройство сопряжения); 2 – узел коммутации

1 – сетевой адаптер 1 – сетевой адаптер

Типы АСУ, их назначение, цели и функции Типы АСУ, их назначение, цели и функции Состав АСУП Современные тенденции в построении АСУП

Различают два основных типа АСУ: Различают два основных типа АСУ: автоматизированные системы организационно-экономического или административного управления (АСУП); автоматизированные системы управления технологическими процессами (АСУ ТП). К АСУП относятся различные отраслевые, территориальные АСУ, АСУ производственными объединениями, предприятиями и др. На практике часто приходится иметь дело с системами, где комбинируются функции, характерные как для АСУП, так и для АСУ ТП.













