






















, а на тело m2 со стороны m1 сила F2(1). По третьему закону Ньютона сумма F2(1) + F1(2) равна нулю. Ускорение поезда можно найти, применяя к каждому вагону второй закон Ньютона и затем складывая следующие…")

:")

.")



Презентация на тему: Классическая динамика. Законы ньютона

Сегодня: пятница, 29 ноября 2013 г. КЛАССИЧЕСКАЯ ДИНАМИКА.ЗАКОНЫ НЬЮТОНА

Лекция 3 Тема: КЛАССИЧЕСКАЯ ДИНАМИКА.ЗАКОНЫ НЬЮТОНАСодержание лекции:ВведениеИнерциальные системы отсчета.Первый закон Ньютона2. Второй закон Ньютона. Основные понятия3. Третий закон Ньютона4. Свойства пространства-времени и уравнения классической динамики.

Глава 2. КЛАССИЧЕСКАЯ ДИНАМИКА. ЗАКОНЫ НЬЮТОНА2.1. Введение Динамика – раздел механики, посвященныйизучению движения материальных тел поддействием приложенных к ним сил. В основе классической динамики лежатзаконы Ньютона. Как и другие принципы, лежащие в основефизики, они являются обобщением опытныхфактов.

Законы классической динамики имеют огромную область применения от описания движения микроскопических частиц в модели идеального газа до поведения гигантских тел во Вселенной. Открытие, применение и осознание этих законов определяют технических прогресс человечества на протяжении уже более трех веков.

2.2. Инерциальные системы отсчета. Первый закон Ньютона Для описания механических явлений надо выбрать систему отсчета. В различных системах отсчета законы движения имеют, в общем случае, различный вид.

Оказывается можно найти такую системуотсчета, в которой законы механики имеютнаиболее простой вид. Это система отсчета с однородным иизотропным пространством и однороднымвременем.Такая система отсчета называется инерциальной.

В инерциальной системе отсчета всякое свободное движение происходит с постоянной по величине и направлению скоростью. Это утверждение оставляет содержание первого закона Ньютона закона инерции. Если наряду с имеющейся у нас инерциальной системой отсчета мы введем другую систему отсчета, движущуюся относительно первой прямолинейно и равномерно, то законы свободного движения по отношению к этой системе будут такими же, как и по отношению к первоначальной:свободное движение снова будет происходить с постоянной скоростью.

Существует бесконечное множество инерциальных систем отсчета, движущихся относительно друг друга равномерно и прямолинейно. Во всех инерциальных системах свойства пространства и времени одинаковы и одинаковы все законы механики. Это утверждение составляет содержание принципа относительности Галилея.

Координаты одной и той же точки в разных системах отсчета K1 и K2, из которых K1 движется относительно K2 со скоростью v, связаны друг с другом соотношением

Подразумевается, что время течет одинаково в K1 и K2: t1 = t2 = t. Представление об абсолютном времени лежит в основе классический механики. Принцип относительности Галилея можно сформулировать как требование инвариантности уравнений механики по отношению к преобразованиям Галилея:

Из абсолютности времени и принципа относительности Галилея следует, что в классической механике взаимодействие между телами распространяется мгновенно. Если бы взаимодействие было бы не "мгновенным", то в силу принципа Галилея и однородности времени скорость распространения фундаментальных взаимодействий была бы различна в разных инерциальных системах отсчета. Это привело бы к различию законов движения тел в разных инерциальных системах отсчета.

Из первого закона следует важный физический принцип: существование инерциальной системы отсчета. Смысл первого закона состоит в том, что: если на тело не действуют внешние силы, то существует система отсчета, в которой оно покоится. Но если в одной системе тело покоится, то существует множество других систем отсчета, в которых тело движется с постоянной скоростью.

Следствием первого закона Ньютона является утверждение: если наблюдатель находится в инерциальной системе отсчета,а это удостоверяет покоящееся в ней тело, то все прочие тела, на которые не действуют силы, будут также находиться в покое или двигаться с постоянной скоростью.

2.3. Второй закон Ньютона. Основные понятия Второй закон Ньютона количественно определяет: изменение состояние движения тела под действием внешних сил. Под силой в механике понимают всякую причину, изменяющую состояние движения тела. Всякое тело оказывает сопротивление при попытках привести его в движение или изменить модуль или направление его скорости. Это свойство тел называется инертностью.

Неизвестную массу m можно сравнить с данной стандартной массой m0, поместив между ними небольшую сжатую пружину. Отпустив пружину, мы заставим первоначально покоившиеся массы разлететься в противоположные стороны со скоростями v и v0 соответственно. При этом количественно неизвестную массу m можно определить следующим образом:m = m0v0/v (определение инертной массы).

Импульс или количество движенияматериальной точки является вектор, равныйпроизведению массы точки на ее скорость:Импульсом или количеством движениясистемы материальных точек назовемвекторную сумму импульсов отдельныхматериальных точек, из которых эта системасостоит.Для системы из двух материальных точекp = p1 + p2 = m1v1 + m2v2.

В инерциальной системе отсчета изменение импульса p материальной точки со временем представляется уравнением Величина F, равная скорости изменения импульса во времени, называется силой, действующей на рассматриваемую материальную точку. Очевидно, сила F есть вектор, поскольку она равна производной вектора p по времени.

Таким образом, в инерциальной системе отсчета производная импульса материальной точки по времени равна действующей на нее силе.Это утверждение называется вторым законом Ньютона, а соответствующие ему уравнения – уравнениями движения материальной точки.

Во второй закон Ньютона входит результирующая сила. Поэтому прежде чем применять второй закон Ньютона, нужно сначала найти векторную сумму всех сил, действующих на данное тело. Это положение очень существенно, и оно имеет дополнительное физическое содержание, которое можно проверить экспериментально.

Соотношение ma = Fрез предполагает аддитивность масс и векторный закон сложения сил.Аддитивность масс означает, что если соединить вместе два тела с массами mA и mB, то масса такого тела будет равна

2.4. Третий закон Ньютона Третий закон динамики Ньютон сформулировал так: “Действию всегда есть равное и противоположное противодействие; иначе взаимодействия двух тел друг на друга между собой равны и направлены в противоположные стороны”. Третий закон утверждает: если тело В действует на тело А с силой FАВ, то в свою очередь тело А обязательно действует на тело В с силой FВА, равной по величине и противоположной по знаку силе FАВ; обе силы направлены вдоль одной прямой.Третий закон отражает тот факт, что сила есть результат взаимодействия двух различных тел.

Третий закон ничего не говорит о величине сил, а только о том, что они равны. Здесь очень важно отметить, что в третьем законе идет речь о силах, приложенных к различным телам. Поезд из трех вагонов, который тянут с внешней силой F.Взаимодействие между вагонами передается с помощью нитей, не имеющих массы.
, а на тело m2 со стороны m1 сила F")
На тело m1 со стороны m2 действует сила F1(2), а на тело m2 со стороны m1 сила F2(1). По третьему закону Ньютона сумма F2(1) + F1(2) равна нулю. Ускорение поезда можно найти, применяя к каждому вагону второй закон Ньютона и затем складывая следующие выражения:F = (m1 + m2 + m3)a,Суммы в квадратных скобках обращаются в нуль.

На рис. изображен брусок массой m, прижатый к стенке с силой F. Если в этом случае автоматически применить уравнение F = ma, то мы получим ускорение a = F/m, которое отлично от нуля. Однако совершенно очевидно, что брусок не испытывает ускорения под действием силы F, потому что атомы стенки отталкивают брусок с силой F1, равной – FРезультирующая сила Fрез = F + F1 = F + (– F) = 0.

Если на брусок действует Fg – сила тяжести, то возникает сила реакции F2, направленная вверх и равная –Fg. В этом случае результирующая сила является суммой всех четырех сил (рис.3.7):

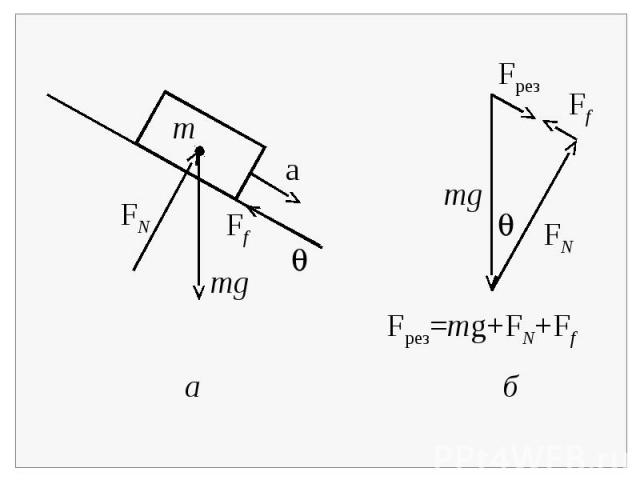
2.5. Наклонная плоскость Вычислим ускорение тела массой m, скользящего по наклонной поверхности, которая образует угол с горизонтальной плоскостью. На рис.а показаны три действующие на тело силы: сила реакции FN, сила трения Ff , направленная против движения, и сила тяжести mg, направленная вниз. Векторное сложение этих сил на рис.б дает Fрез.

Силы образуют прямоугольный треугольник, причем угол между FN и mg равен . Отсюда: Заменяя Fрез на ma , получаем ma = mgsin Ff.В отсутствие трения a = gsin (без трения).

В случае когда имеется трение, в формуле следует заменить Ff на dFN, что даетma = mgsin dFN.Из треугольника сил на рис.б находим FN = mgcos. Подставляя это в последнее соотношение имеем: a = gsin d gcos.Из a = gsin и a = gsin d gcos следует, что наклонную плоскость можно использовать для уменьшения ускорения тела, возникшего благодаря силе тяжести.

Пусть брусок скользит по наклонной плоскости, не ускоряясь. Тогда в a = gsin d gcos нужно положить a = 0, и мы можем написатьgsin = d gcos,откуда tg = d.При этом значении угла наклона тело будет двигаться без ускорения.

Лекция окончена











