



 следует, что при равномерном и прямолинейном движении систем отсчета друг относительно друга ускорения тела в этих двух системах одинаковы, т. е. Действитель…")



Презентация на тему: Относительность движения

Относительность движения Движение тел можно описывать в различных системах отсчета. С точки зрения кинематики все системы отсчета равноправны. Однако кинематические характеристики движения, такие как траектория, перемещение, скорость, в разных системах оказываются различными. Величины, зависящие от выбора системы отсчета, в которой производится их измерение, называют относительными.

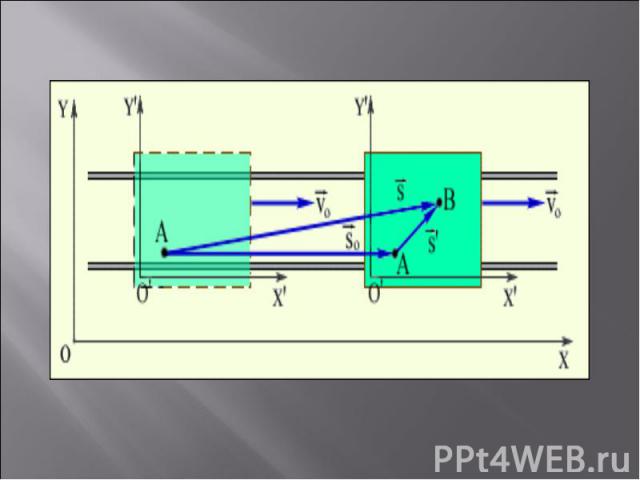
Пример. Пусть имеются две системы отсчета. Система XOY условно считается неподвижной, а система X'O'Y' движется поступательно по отношению к системе XOY со скоростью Система XOY может быть, например, связана с Землей, а система X'O'Y' – с движущейся по рельсам платформой (рис. 1.2.1).Рисунок 1.2.1. Сложение перемещений относительно разных систем отсчета. Пусть человек перешел по платформе за некоторое время из точки A в точку B. Тогда его перемещение относительно платформы соответствует вектору а перемещение платформы относительно Земли соответствует вектору Из рис. 1.2.1 видно, что перемещение человека относительно Земли будет соответствовать вектору представляющему собой сумму векторов и В случае, когда одна из систем отсчета движется относительно другой поступательно (как на рис. 1.2.1) с постоянной скоростью это выражение принимает вид: Если рассмотреть перемещение за малый промежуток времени Δt, то, разделив обе части этого уравнения на Δt и затем перейдя к пределу при Δt → 0 получим: (*) Здесь – скорость тела в «неподвижной» системе отсчета XOY, – скорость тела в «движущейся» системе отсчета X'O'Y'. Скорости и иногда условно называют абсолютной и относительной скоростями; скорость называют переносной скоростью.Соотношение (*) выражает классический закон сложения скоростей:

Абсолютная скорость тела .Абсолютная скорость тела равна векторной сумме его относительной скорости и переносной скорости подвижной системы отсчета. Модель. Относительность движения.

Следует обратить внимание на вопрос об ускорениях тела в различных системах отсчета. Из (*) следует, что при равномерном и прямолинейном движении систем отсчета друг относительно друга ускорения тела в этих двух системах одинаковы, т. е. Действительно, если – вектор, модуль и направление которого остаются неизменными во времени, то любое изменение относительной скорости тела будет совпадать с изменением его абсолютной скорости. Следовательно, Переходя к пределу (Δt → 0), получим

В общем случае, при движениях систем отсчета с ускорением друг относительно друга, ускорения тела в различных системах отсчета оказываются различными.В случае, когда вектора относительной скорости и переносной скорости параллельны друг другу, закон сложения скоростей можно записать в скалярной форме: υ = υ0 + υ'. В этом случае все движения происходят вдоль одной прямой линии (например, оси OX). Скорости υ, υ0 и υ' нужно рассматривать как проекции абсолютной, переносной и относительной скоростей на ось OX. Они являются величинами алгебраическими и, следовательно, им нужно приписывать определенные знаки (плюс или минус) в зависимости от направления движения.

Задача об обгонеЛегковой автомобиль движется со скоростью 20 м/с за грузовым, скорость которого 16,5 м/с. В момент начала обгона водитель легкового автомобиля увидел встречный международный автобус, движущийся со скоростью 25 м/с. При каком наименьшем расстоянии до автобуса можно начинать обгон, если в начале обгона легковая машина была в 15 м от грузовой, а к концу обгона она должна быть впереди на 20 м?Решение. Задача решается на основе принципа относительности Галилея. Решим её в два приёма, рассматривая движение легкового автомобиля: 1) в системе отсчёта «грузовик», причём движение автобуса рассматривать не будем совсем; 2) в системе отсчёта «автобус», а движение грузовика рассматривать не будем.

1. Для определённости за положительное направление примем направление движения легкового автомобиля и грузовика. Тогда в системе «грузовик» легковая машина будет двигаться относительно грузовика со скоростью лг = л – г. С этой скоростью ей придётся проехать расстояние s до грузовика и расстояние l (которое из соображений безопасности оговаривается правилами дорожного движения [5]), чтобы оказаться перед грузовиком. На прохождение расстояния s + l потребуется время . (4)2. Рассмотрим движение легкового автомобиля в относительной системе отсчёта «автобус». В ней скорость легковой машины относительно автобуса ла =|л – а| = л + а. Пусть первоначальное расстояние между легковым автомобилем и автобусом L. Его автомобиль пройдёт за время: (5)3. Обгон считается безопасным, если легковой автомобиль в конце обгона окажется на 20 м впереди грузовика, не доехав при этом до автобуса: (6)Рассчитаем минимальное расстояние между легковым автомобилем и автобусом, когда ещё можно начать обгон:Проанализируем формулу (6). Очевидно, что обгон возможен, если легковой автомобиль движется быстрее грузовика: л > гр, иначе расстояние l получается отрицательным. Также бессмыслен обгон при равных скоростях: л = гр. Итак, поставленная задача решена в рамках теории относительности, законов равномерного прямолинейного движения и, наконец, с рассмотрением принципа независимости движений. Расчёт по формуле (6) можно осуществить на алгоритмическом языке «Бейсик».











