








 система деталей, совершающая механическое движение для преобразования энергии, материалов или информации с целью облегчения труда. Машина характерна наличием источника энергии и требует присутс…")

. Строением механизма определяются такие его важнейшие характеристики, как виды осуществляемых движений,…")

 называют подвижное соединение двух соприкасающихся звеньев Совокупность поверхностей, линий и точек звена, входящих в соприкосновение (контакт) с другим звеном пары, называют элементом пары. Для того чтобы э…")

 – е)")


 самых различных механизмов, связывающие число степеней свободы W механизма с числом звеньев и числом и видом его кинематических пар. Эти закономерности носят на…")






 механической передачи к угловой скорости ведомого элемента(ω2) или отношение частоты …")

. Основной принцип ее состоит в том, что механизм может б…")

 группы относительно тех звеньев, к которым она присоединяется; nп.г. ,pн.г. — число звеньев и низших пар структурной группы Ассура. Поскольку nп.г. и pн.г. могут быть только целыми числами,…")







 — один из самых распространенных, он является основным механизмом в поршневых…")
 преобразует непрерывное вращение входного звена — кривошипа 1 в прерывистое (с остановами) вращение выходного звена — креста 2. Механизм имеет стойку 3 и высшую пару, образованную цевкой В кривошипа и пазом креста.")




Презентация на тему: Основы структуры механизмов, структурный и кинематический анализ

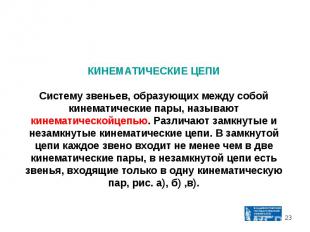
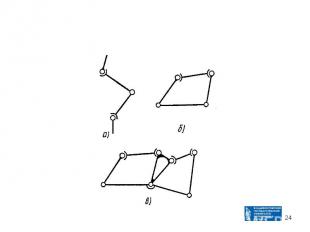
Основы структуры механизмов, структурный и кинематический анализ Основы структуры механизмов, структурный и кинематический анализ Введение. Машина и механизм. Структура механизмов. Звено. Кинематическая пара, классификация кинематических пар, кинематическая цепь. Структура и классификация механизмов. Степени подвижности механизмов. Структура плоских и пространственных механизмов. Структурный анализ механизмов. Кинематическая схема механизма. Входные и выходные звенья. Передаточные механизмы. Передаточное отношение механизмов. Линейное и угловое передаточные отношения. Классификация механизмов. Группы Ассура. Классификация механизмов по Ассуру. Задачи и методы кинематического анализа. Виды плоского движения твердого тела. Мертвые положения механизма. Условие существования кривошипа. Планы скоростей и ускорений. Абсолютные и относительные угловые скорости звеньев.

Введение

Сформировать знания по структурному , кинематическому, динамическому и силовому анализу машин и механизмов, принципам выполнения расчетов основных видов механических передач, проектированию приводов транспортных и технологических машин, их узлов и элементов передач.

Дать студентам представление об особенностях проектирования изделий, принципах инженерных расчетов, механических свойствах конструкционных материалов, основных методах расчетов сварных швов при различных схемах нагружения, определении допускаемых напряжений в сварных швах, выборе стандартных посадок с натягом из условия неподвижности соединения под действием нагрузки без дополнительных креплений для обеспечения передачи заданной нагрузки, методиках расчета одиночных и групповых болтовых и шпоночных соединений по эквивалентным напряжениям, Дать студентам представление об особенностях проектирования изделий, принципах инженерных расчетов, механических свойствах конструкционных материалов, основных методах расчетов сварных швов при различных схемах нагружения, определении допускаемых напряжений в сварных швах, выборе стандартных посадок с натягом из условия неподвижности соединения под действием нагрузки без дополнительных креплений для обеспечения передачи заданной нагрузки, методиках расчета одиночных и групповых болтовых и шпоночных соединений по эквивалентным напряжениям,

Дисциплине «Прикладная механика» составлена в соответствии с требованиями ГОС РФ ВПО. Дисциплине «Прикладная механика» составлена в соответствии с требованиями ГОС РФ ВПО. Содержанием дисциплины является механика как основа инженерной подготовки, ее методов и целей. Включает основы ТММ, деталей машин, технологических процессов и основ конструирования. Предназначена студентам II курса специальности 19070265 «Организация и безопасность движения» для очной и заочной форм обучения.

Знания и умения, получаемые студентами в результате изучения дисциплины, необходимы для подготовки к изучению следующих дисциплин: «Рабочие процессы, конструкция и основы расчета автомобильных двигателей», «Технология машиностроения».

Студент должен уметь: Студент должен уметь: применять на практике методы полной и неполной взаимозаменяемости деталей, узлов и агрегатов; производить расчеты допускаемых напряжений по основным теориям прочности; использовать на практике основные принципы прочностных расчетов; работать с различными типами и классами приборов и средств измерения.

Основная литература Основная литература Иосилевич Г.Б. Прикладная механика. – М.: Машиностроение, 2000. Ковалев Н.А. Прикладная механика. – М.: Высшая школа, 2000. Артоболевский И.И. Теория механизмов и машин. – М., 2004. Гузенков П.Г. Детали машин. – М.: Высшая школа, 2006. Дополнительная литература Анурьев В.И. Справочник конструктора-машиностроителя. – М.: Ма­шиностроение, 2002. Кожевников С.Н. Теория механизмов и машин. – М., 2003. Решетов Д.Н. Детали машин. – М.: Машиностроение, 2003. Чубенко Е.Ф. Лабораторный практикум по деталям машин: учебное пособие. – Владивосток: Изд-во ВГУЭС, 2005
 система деталей, соверша")
МАШИНА – (греч. "махина" – огромная, грозная) система деталей, совершающая механическое движение для преобразования энергии, материалов или информации с целью облегчения труда. Машина характерна наличием источника энергии и требует присутствия оператора для своего управления.

Всякая машина состоит из двигательного, передаточного и исполнительного механизмов. МЕХАНИЗМ – система деталей, предназначенная для передачи и преобразования движения.

Механизм является системой твердых тел. Поэтому механизмы имеют как весьма простое, так и достаточно сложное и разнообразное строение (структуру). Строением механизма определяются такие его важнейшие характеристики, как виды осуществляемых движений, способы их преобразования, число степеней свободы. Формирование механизма, т. е. соединение отдельных его частей в единую систему, сопровождается наложением связей. Механизм является системой твердых тел. Поэтому механизмы имеют как весьма простое, так и достаточно сложное и разнообразное строение (структуру). Строением механизма определяются такие его важнейшие характеристики, как виды осуществляемых движений, способы их преобразования, число степеней свободы. Формирование механизма, т. е. соединение отдельных его частей в единую систему, сопровождается наложением связей.

Твердые тела, из которых образуется механизм, называют звеньями. При этом имеются в виду как абсолютно твердые, так и деформируемые и гибкие тела. Звено — либо одна деталь, либо совокупность нескольких деталей, соединенных в одну кинематически неизменяемую систему. Звенья различают по конструктивным признакам (коленчатый вал, шатун, поршень, зубчатое колесо и т. д.) и по характеру их движения. Твердые тела, из которых образуется механизм, называют звеньями. При этом имеются в виду как абсолютно твердые, так и деформируемые и гибкие тела. Звено — либо одна деталь, либо совокупность нескольких деталей, соединенных в одну кинематически неизменяемую систему. Звенья различают по конструктивным признакам (коленчатый вал, шатун, поршень, зубчатое колесо и т. д.) и по характеру их движения.
 называют подвижное соединение двух соп")
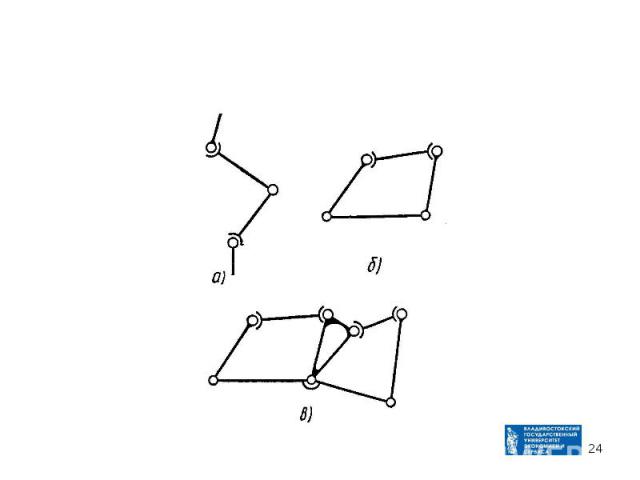
Кинематической парой (сокращенно — парой) называют подвижное соединение двух соприкасающихся звеньев Совокупность поверхностей, линий и точек звена, входящих в соприкосновение (контакт) с другим звеном пары, называют элементом пары. Для того чтобы элементы пары находились в постоянном соприкосновении, пара должна быть замкнута геометрическим (за счет конструктивной формы звеньев) или силовым (силой тяжести, пружиной, силой давления жидкости ,газа и т.п. ) способом. Кинематической парой (сокращенно — парой) называют подвижное соединение двух соприкасающихся звеньев Совокупность поверхностей, линий и точек звена, входящих в соприкосновение (контакт) с другим звеном пары, называют элементом пары. Для того чтобы элементы пары находились в постоянном соприкосновении, пара должна быть замкнута геометрическим (за счет конструктивной формы звеньев) или силовым (силой тяжести, пружиной, силой давления жидкости ,газа и т.п. ) способом.

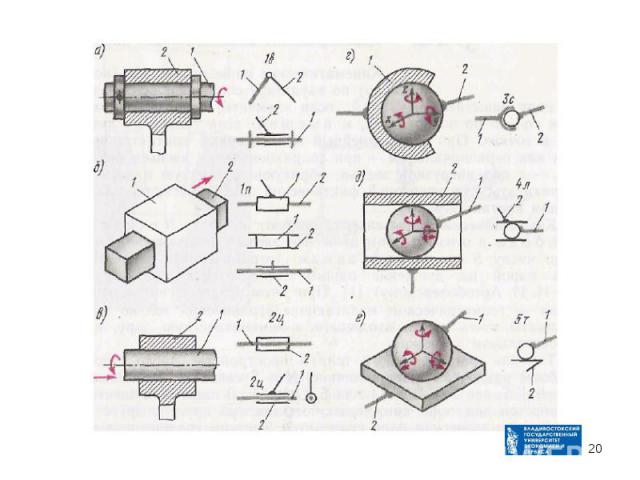
Для твердого тела, свободно движущегося в пространстве, число степеней свободы равно шести: три возможных перемещения вдоль неподвижных ко­ординатных осей и три — вокруг этих осей. Для твердого тела, свободно движущегося в пространстве, число степеней свободы равно шести: три возможных перемещения вдоль неподвижных ко­ординатных осей и три — вокруг этих осей. Для звеньев, входящих в кинематическую пару, число степеней свободы в их относительном движении всегда меньше шести, так как условия постоянного соприкасания звеньев кинематической пары уменьшают число возможных перемещений. По предложению В. В. Добровольского все кинемати­ческие пары подразделены по числу степеней свободы на одно-, двух-, трех-, четырех - и пятиподвижные.
 – е)")
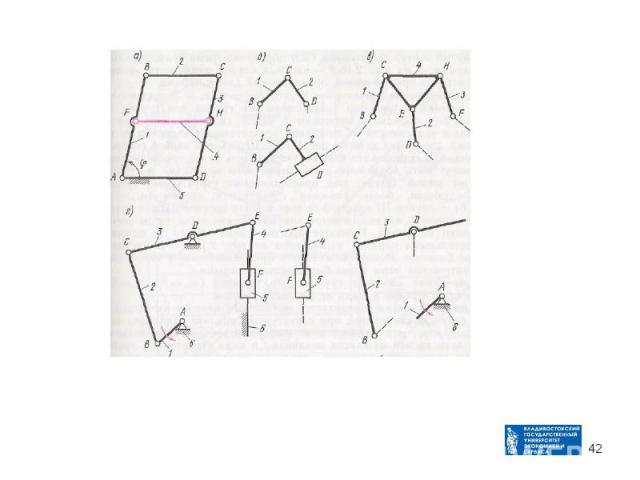
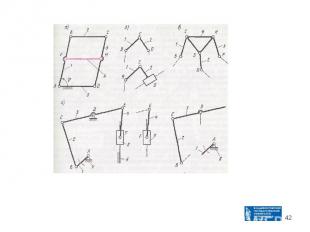
Наиболее используемые кинематические пары показаны на рисунках а) – е)
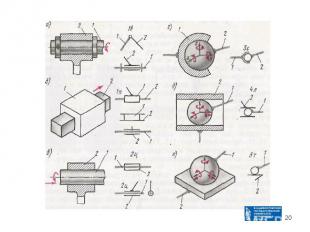

Совокупность поверхностей линий отдельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называется элементом кинематической пары. Совокупность поверхностей линий отдельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называется элементом кинематической пары. Кинематическую пару можно рассматривать как совокупность двух элементов, каждый из которых принадлежит одному звену. К низшим парам принадлежат: вращательная поступательная, винтовая, цилиндрическая, сферическая и плоскостная.

Низшей КП называется кинематическая пара, в которой требуемое относительное движение звеньев между собой осуществляется по поверхности. Низшей КП называется кинематическая пара, в которой требуемое относительное движение звеньев между собой осуществляется по поверхности. Высшей КП называется кинематическая пара, в которой требуемое относительное движение звеньев может быть получено только сопрекасновенем ее элементов по линиям и в точках.

Существуют общие закономерности в Существуют общие закономерности в структуре (строении) самых различных механизмов, связывающие число степеней свободы W механизма с числом звеньев и числом и видом его кинематических пар. Эти закономерности носят название структурных формул механизмов. Для пространственных механизмов в настоящее время наиболее распространена формула Малышева.

Для кинематической цепи, у которой одно из звеньев неподвижно, Число связей, накладываемых на звенья при их соединении в кинематические пары, зависит от класса пар. Обозначим число кинематических пар I, II, III, IV, и V классов соответственно через Р1, Р2, Р3, Р4, Р5. Тогда выражение для числа степеней свободы W кинематической цепи, составленной из звеньев. Для кинематической цепи, у которой одно из звеньев неподвижно, Число связей, накладываемых на звенья при их соединении в кинематические пары, зависит от класса пар. Обозначим число кинематических пар I, II, III, IV, и V классов соответственно через Р1, Р2, Р3, Р4, Р5. Тогда выражение для числа степеней свободы W кинематической цепи, составленной из звеньев. W= 6-5P5-4P4-3P3-2P2-P1.

W=3n-2P5-P4 Формула называется структурной формулой плоских шарнирных механизмов, получена акад. П.П. Чебышевым в 1869 г. Она связывает степень подвижности механизма с числом его звеньев и пар кинематической цепи.

Структурным анализом механизма называется проектирование структурной схемы, указывающий стойку, вид кинематических пар и их взаимное расположение.

Кинематическая схема – графическое изображение соединения звеньев в кинематические пары с указанием размеров звеньев.

Плоские механизмы с низшими парами. Пространственные механизмы низшими парами. Кулачковые механизмы. Зубчатые механизмы.

Механическими передачами или просто передачами называются механизмы, которые преобразуют параметры движения от двигателя к исполнительным органам машины. Механическими передачами или просто передачами называются механизмы, которые преобразуют параметры движения от двигателя к исполнительным органам машины. Механическая энергия передаётся, как правило, с преобразованием скоростей и вращающих моментов, а иногда с преобразованием вида и закона движения.

Передаточное отношение — одна из важных характеристик механической передачи вращательного движения, находится как отношение угловой скорости ведущего элемента (ω1) механической передачи к угловой скорости ведомого элемента(ω2) или отношение частоты вращения ведущего элемента (n1) механической передачи к частоте вращения ведомого элемента (n2).

Классификация Классификация Передачи зацепления: Цилиндрические зубчатые передачи - отличаются надёжностью и имеют высокий ресурс эксплуатации. Обычно применяются при особо сложных режимах работы, для передачи и преоброзовывания больших мощностей. Цилиндрические передачи бывают прямозубыми, косозубыми и шевронными .

Разработанная Л. Б. Ассуром структурная классификация плоских рычажных механизмов облегчает исследование имеющихся и создание новых механизмов без избыточных связей в их плоской схеме (gn = 0). Основной принцип ее состоит в том, что механизм может быть получен путем присоединения к одному или нескольким начальным звеньям и стойке кинематических цепей (структурных групп) нулевой подвижности относительно тех звеньев, к которым группа присоединяется. Разработанная Л. Б. Ассуром структурная классификация плоских рычажных механизмов облегчает исследование имеющихся и создание новых механизмов без избыточных связей в их плоской схеме (gn = 0). Основной принцип ее состоит в том, что механизм может быть получен путем присоединения к одному или нескольким начальным звеньям и стойке кинематических цепей (структурных групп) нулевой подвижности относительно тех звеньев, к которым группа присоединяется.

Таким образом, структурная группа — кинематическая цепь, присоединение которой к механизму не изменяет числа его степеней свободы. Для краткости в дальнейшем введем условный термин — первичный механизм (по Таким образом, структурная группа — кинематическая цепь, присоединение которой к механизму не изменяет числа его степеней свободы. Для краткости в дальнейшем введем условный термин — первичный механизм (по И. И. Артоболевскому— механизм I класса), представляющий собой простейший двухзвенный механизм, состоящий из подвижного звена и стойки; число первичных механизмов равно числу степеней свободы механизма. Для структурных групп Ассура, согласно определению и формуле Чебышева (при рв.г. = 0, n = nп.г. и qп = 0), справедливо равенство: Wп.г. = 3nп.г. — 2pн.г. = 0. (1)
 группы относительно")
где Wп.г. — число степеней свободы структурной (поводковой) группы относительно тех звеньев, к которым она присоединяется; nп.г. ,pн.г. — число звеньев и низших пар структурной группы Ассура. Поскольку nп.г. и pн.г. могут быть только целыми числами, из равенства (1) получим следующие их значения: nп.г. = 2, 4, 6, … ; pн.г. = 3, 6, 9, … .

Кинематический анализ – определение движения звеньев механизма по заданному движению начальных звеньев.

Задачи кинематического анализа состоят в определении перемещений, скоростей и ускорений звеньях механизма. Цель изучить движение звеньев без учета сил, вызывающих это движение.

Методы кинематического анализа механизмов основаны на использовании приемов аналитической геометрии, тензорно-матричных операций, комплексных переменных величин и др. Эти методы связаны с координатными системами и приводят к скалярным уравнениям относительно искомых величин тем более высоких степеней, чем сложнее исследуемые механические системы. Методы кинематического анализа механизмов основаны на использовании приемов аналитической геометрии, тензорно-матричных операций, комплексных переменных величин и др. Эти методы связаны с координатными системами и приводят к скалярным уравнениям относительно искомых величин тем более высоких степеней, чем сложнее исследуемые механические системы.

Как мы знаем, под плоским движением понимают такое движение твердого тела, когда все его точки движутся параллельно одной их главных координатных плоскостей или движутся в них. Различают три вида плоского движения: поступательное движение твердого тела, вращательное движение вокруг неподвижной оси и плоско-параллельное движение твердого тела.




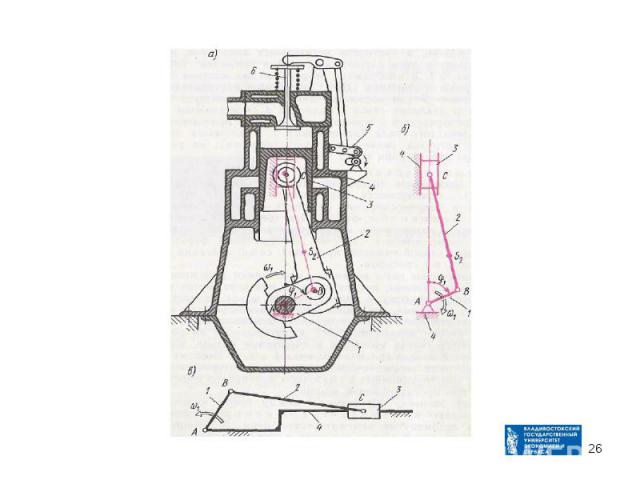
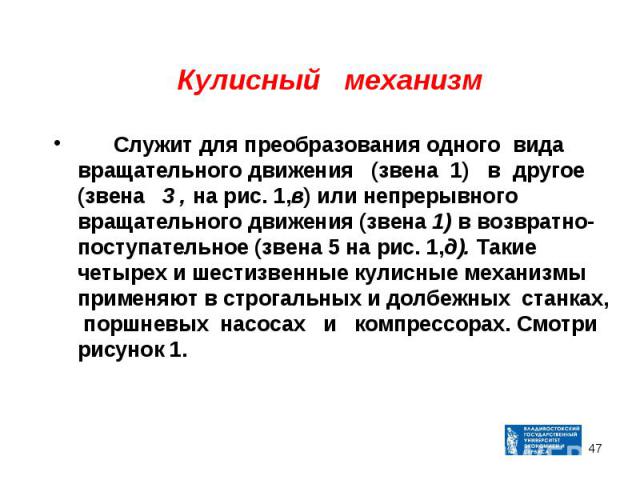
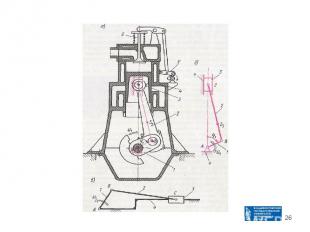
Пример плоских механизмов с низшими парами. Пример плоских механизмов с низшими парами. Кривошипно-ползунный механизм (см. ниже на рисунке ДВС: а — конструкция; б — схема) — один из самых распространенных, он является основным механизмом в поршневых машинах (двигатели внутреннего сгорания, компрессоры, насосы), в ковочных машинах и прессах и т. д. На рис. в изображена схема внеосного (дезаксиального) кривошипно-ползунного механизма.
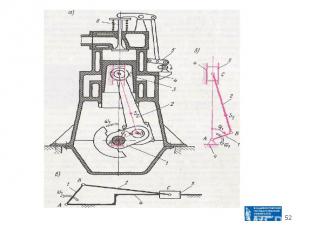
 преобразует непрерывное вращение входного звена —")
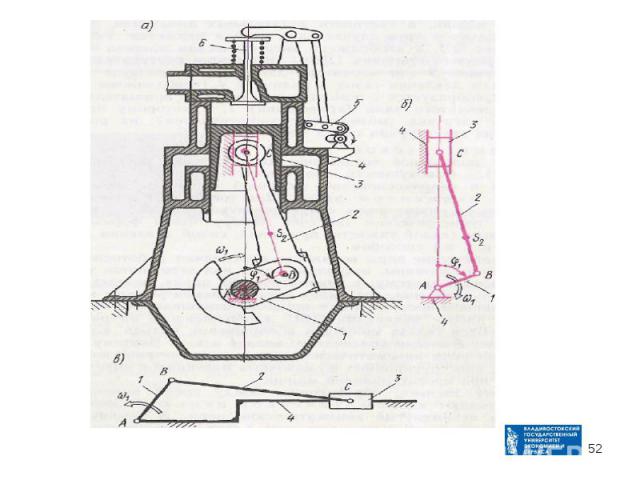
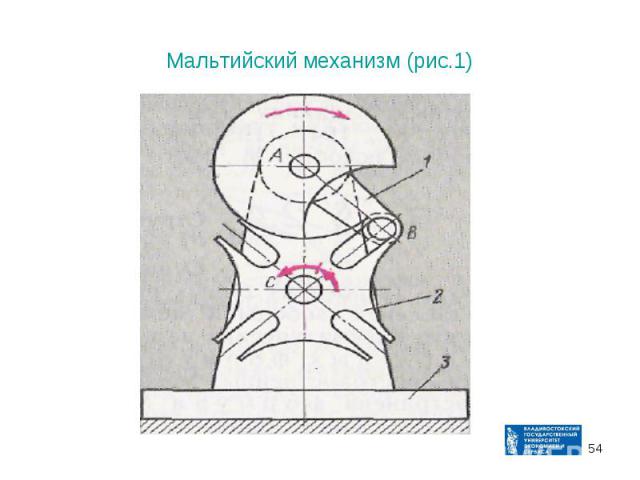
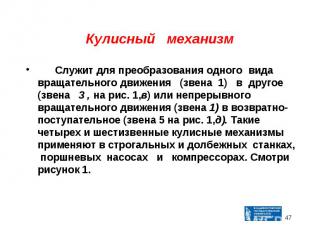
Мальтийский механизм (рис. 1) преобразует непрерывное вращение входного звена — кривошипа 1 в прерывистое (с остановами) вращение выходного звена — креста 2. Механизм имеет стойку 3 и высшую пару, образованную цевкой В кривошипа и пазом креста.


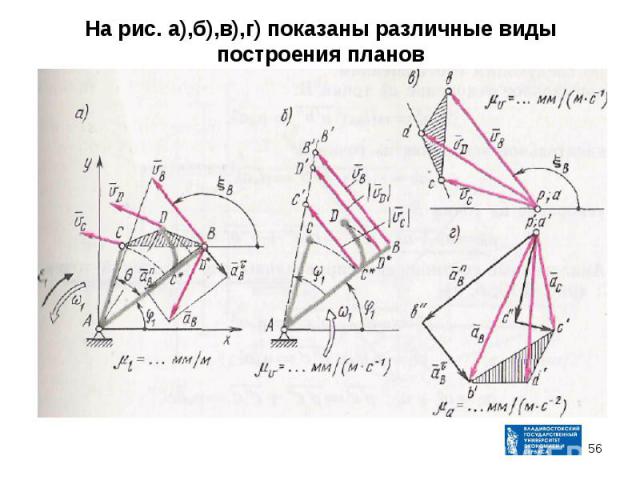
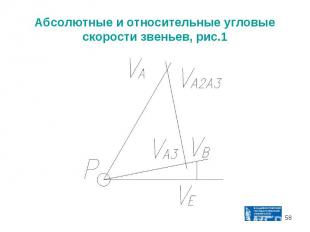
Планы скоростей и ускорений. Планом скоростей механизма называют чертеж, на котором изображены в виде отрезков векторы, равные по модулю и по направлению скоростям различных точек звеньев механизма в данный момент. План скоростей для механизма является совокупностью нескольких планов скоростей для отдельных звеньев, у которых полюса планов р являются общей точкой — полюсом плана скоростей механизма. Чертеж, на котором изображены в виде отрезков векторы, равные по модулю и направлению ускорениям различных точек звеньев механизма в данный момент, называют планом ускорений механизма. Планы скоростей и ускорений. Планом скоростей механизма называют чертеж, на котором изображены в виде отрезков векторы, равные по модулю и по направлению скоростям различных точек звеньев механизма в данный момент. План скоростей для механизма является совокупностью нескольких планов скоростей для отдельных звеньев, у которых полюса планов р являются общей точкой — полюсом плана скоростей механизма. Чертеж, на котором изображены в виде отрезков векторы, равные по модулю и направлению ускорениям различных точек звеньев механизма в данный момент, называют планом ускорений механизма.


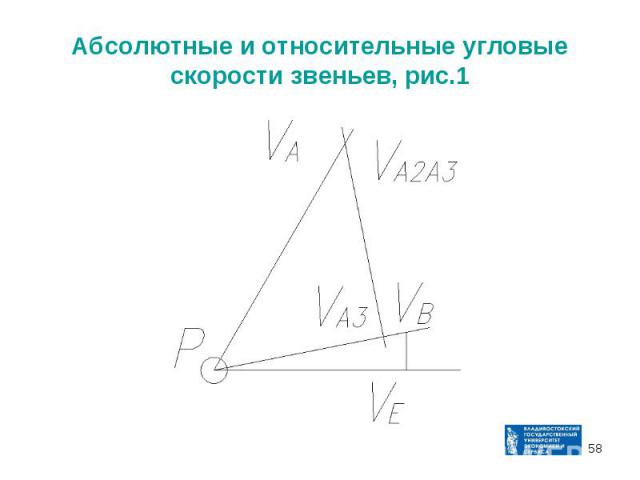
Абсолютная скорость звена на плане скоро- стей изображается всегда линией, исходящей из полюса Р, а относительные – линиями, соединяющими концы векторов абсолютных скоростей. Смотри рис.1.

В результате рассмотрения обширного материала в данной лекции мы достаточно подробно ознакомились с основными понятиями и определениями ТММ, изучили основы структуры механизмов, cуть их структурного и кинематического анализа.

Что называется машиной, механизмом? Что называется машиной, механизмом? Какие виды механизмов бывают? Что такое кинематическая схема? Что понимают под кинематической парой и цепью? Что такое структурный и кинематический анализ механизма? Какие виды трения вам известны? Что такое коэффициент трения скольжения и качения? Какие факторы влияют на величину силы трения скольжения? Принцип построения планов скоростей и ускорений?











 енергетика")